4rchive
[
Home
] [
Feed
] [
Search
]
Post Content (fulltext)
Post Content (exact)
Thread Title (fulltext)
Thread Title (exact)
Author
Image MD5 Hash
All Boards
3
a
aco
adv
an
b
bant
biz
c
cgl
ck
cm
co
d
diy
e
fa
fit
g
gd
gif
h
hc
his
hm
hr
i
ic
int
j
jp
k
lgbt
lit
m
mlp
mu
n
news
o
out
p
po
pol
pw
qst
r
r9k
s
s4s
sci
soc
sp
t
tg
toy
trv
tv
u
v
vg
vip
vm
vmg
vp
vr
vrpg
vst
vt
w
wg
wsg
wsr
x
xs
y
Search results for "b04baaedcbb3cf3c54afe08b1d1ea0f2" in md5 (1)
/diy/ - /robo/ - Robotics General
Anonymous
7/11/2025, 1:30:13 PM
No.2930553
IMG_0647.jpg
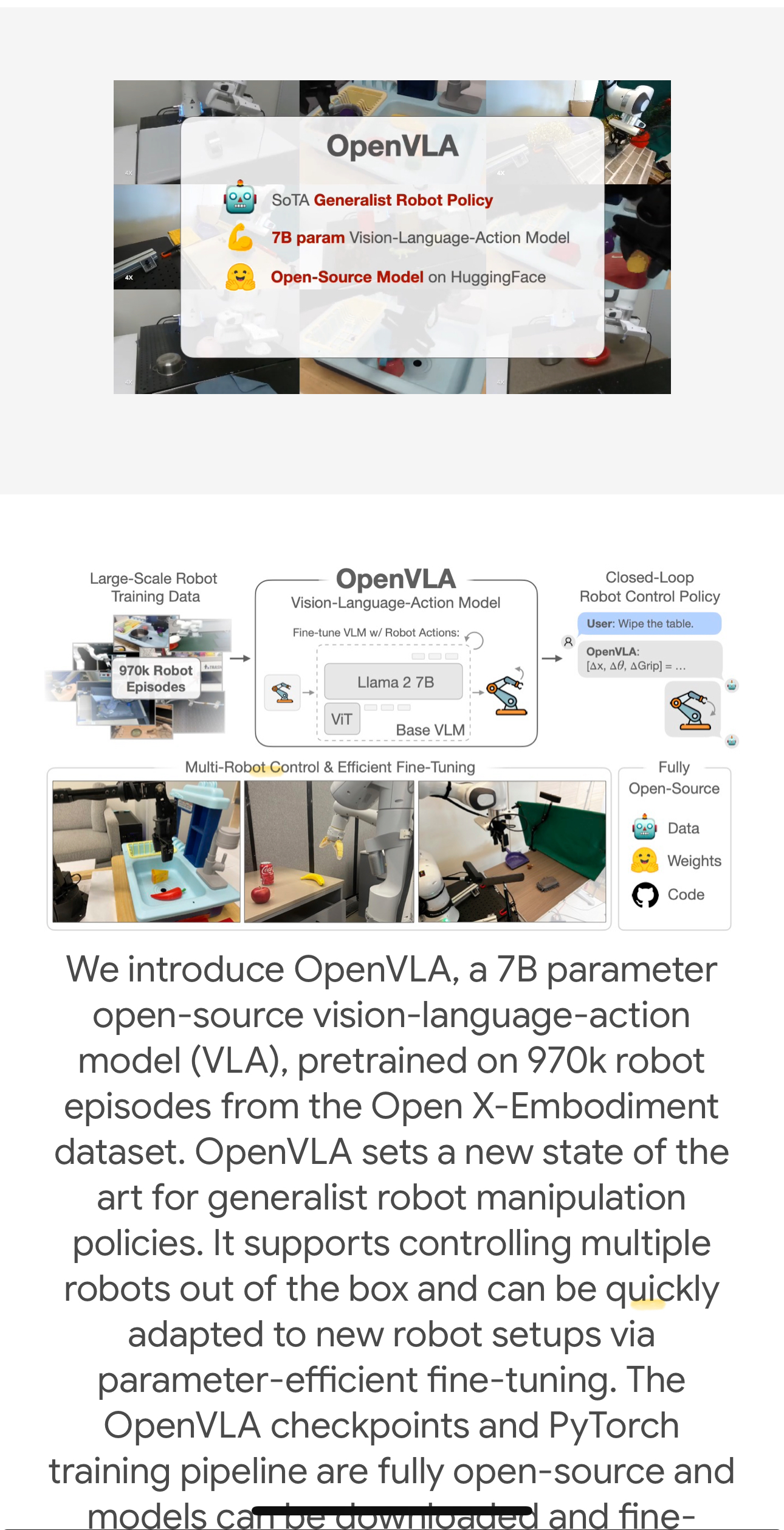
Visual Language Action models are the big hot thing in robotics right now, have any of you tried running some of your own?