>>536981798
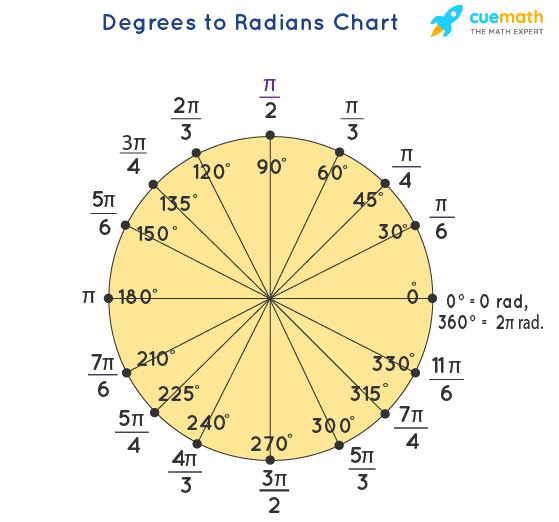
I'm sorry I expected that turning in one direction forever would make a sensor expressing its yaw would have a range from 0 up to some maximum value (either 2pi or 360, traditionally) representing an arc creating a full circle, and then over/underflow back to 0 or further values being equivalent to mod 2pi rads/360 deg/whatever we decide a full circle/period is, and negative numbers implying travelling in the opposite direction... You know, how pretty much all trigonometry is done.
instead of starting 0, going up to 1/2 pi in at linear rate then descending back down to negative 1/2 pi and back up to 0, making a mockery of the number line or any attempt at there being a discrete angle for every facing in a 2d space, inadvertently defining a circle as having 0 degrees in total