drawings
md5: eef5e51af885a4cf4c163bffac21b4f5
🔍
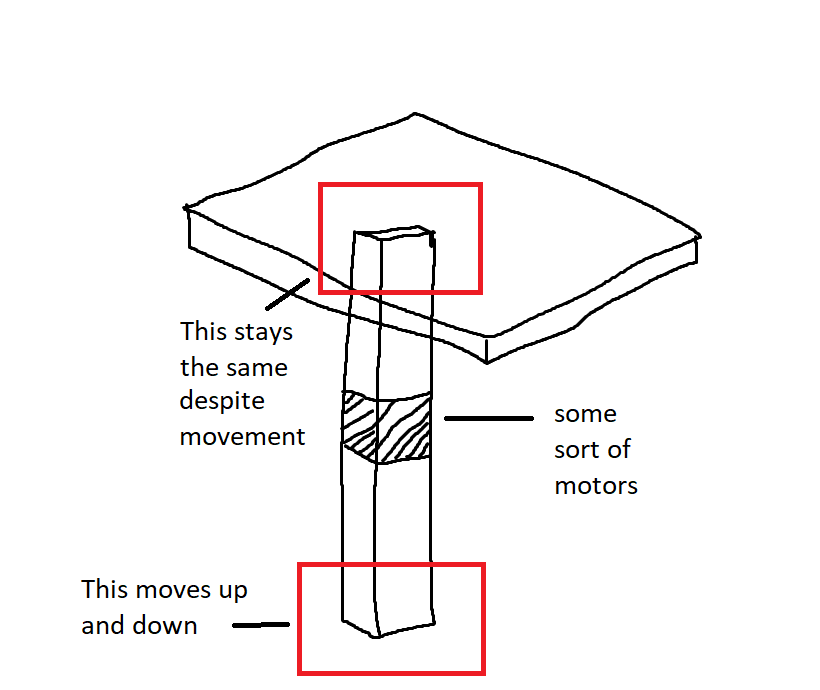
I need to build a stabilizer for movement along the Y-axis. I’ve searched online, but it seems no one has created such a device yet.
Does anyone know what kind of device can detect whether an object is moving up or down?
What specifically is it for? Could you use a laser system and a receiver and program something to keep the receiver inline with the laser at all times similar to a grading system for dirt work?
>>2932680Theoretically, this is designed for use with a camera, but I want to repurpose it for other things. I considered using laser-based height detection, but the issue is that the ground level isn't constant. The distance between the laser and the ground will change.
I guess It might work if I record the current distance and adjust the stabilizer based on any changes.
But is it possible? I’ve never worked with distance sensors before..
>>2932696However, while thinking it through, I realized there might be a scenario where the distance between the laser and the visible ground remains constant, but the object’s height changes. In that case, laser-based detection won't work.
So is there any other way to detect change of the height other than through distance sensors?
>>2932696Try searching for a camera motion isolator instead of stabilizer. Picrel is meant for live events venues so they can handle a lot of vibration, as far as I can tell they're purely mechanical. I don't think you really need sensors or anything, even with astrophotography at extreme zoom levels and long exposure times you can get by with rubber pads under the tripod.
>>2932703From what I looked on the internet, this device reduces camera shakiness. However, I need something that can handle large, sudden movements along the Y-axis. I want the cameras or devices to remain fixed in position.
Why call 'the' axis the 'Y-axis'? You have only one as far as I can tell and you do you but most people wouldn't name 'the' single axis anything specific and conventionally start naming at 'X' or, if I'm getting your drawing correctly, call it 'Z' in accordance with convention to imply it's vertical.
So is it correct that you're looking to have a camera hanging from something (like a cart on a taut horizontal rope, or a drone flying level, etc.) move fast in the horizontal plane while following arbitary ground contour at a set distance over ground?
In that case I would look at laser or ultrasound ranging and attach a sensor at the very bottom. Look at those very cheap arduino (ultrasound(?)) ranging sensors, maybe thex have the bandwidth you need, if not pay more. Then add either a window comparator or a microcontroller that has only one task: Control a linear actuator so that the distance to ground minus set value is always at 0. Easy as.
Next step will be determining all the parameters you need to handle: What rate of error does the thing need to be able to follow, what bandwidth, acceleration and speed results from that and what does that mean in terms of forces involved. Then choose the exact type of actuator and sensor you'll need. Faster stuff might be easier and even cheaper to control properly on microcontrollers over window comparator.
>>2932949I need to build partial mechanical chicken
>>2932952it's the Y axis because OP is a zoomer and it's like that in minecraft
>>2932992there is way more software that utilizes y as a height axis.
>>2932952You are right naming axis in this case scene is useless. Anyway, thanks man, that's a lot of knowledge. The use case is a bit different, but everything you said still applies.
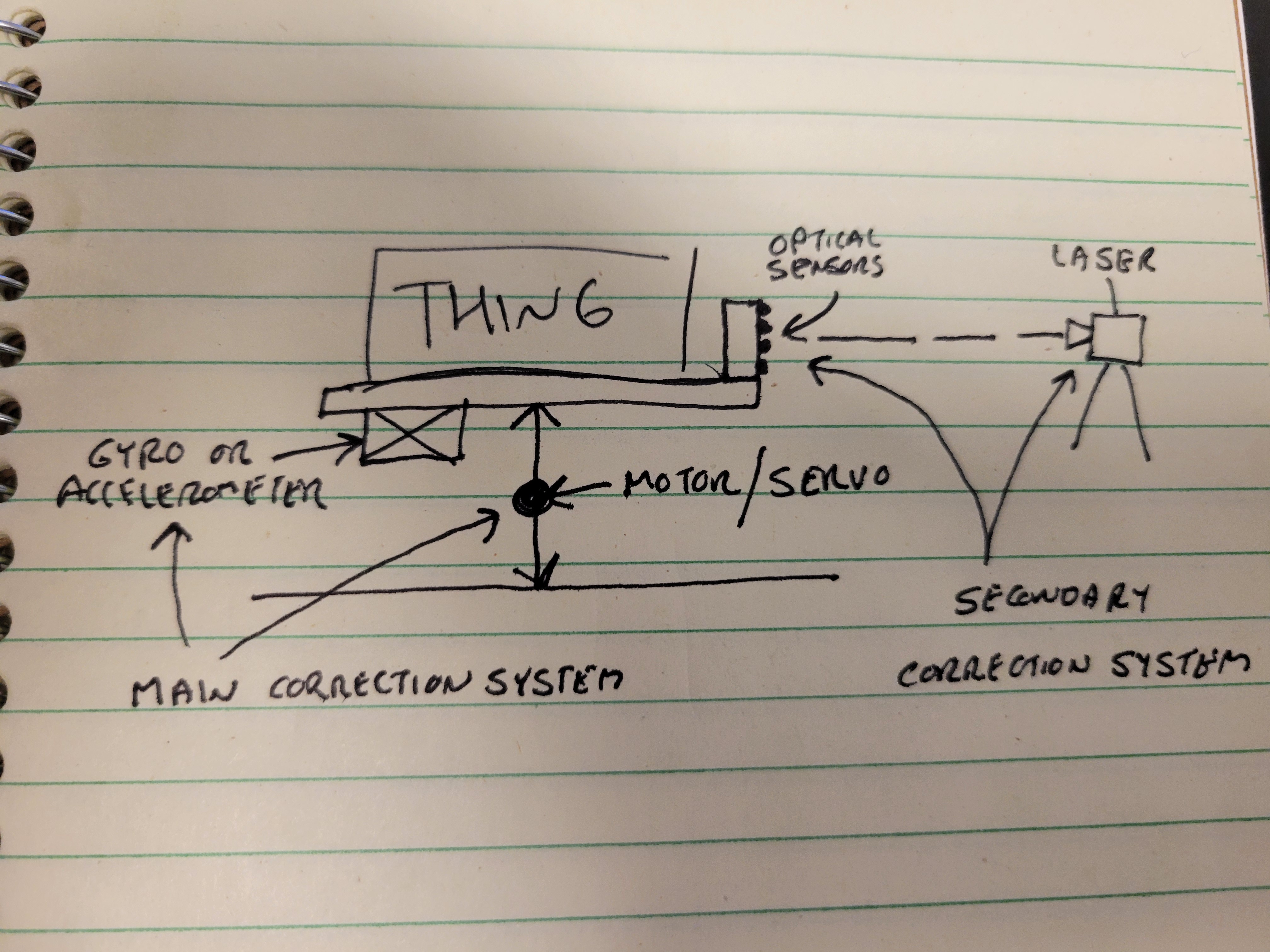
You could use an accelerometer (or gyro) to detect vertical movement, then run the output from that through a controller to actuate motors/servos to maintain a fixed vertical location.
However since you're only dealing with acceleration to sense movement, it would not know if or when it might be drifting from the original reference point. You could have a secondary system that uses distance measuring to correct any straying from the original reference.
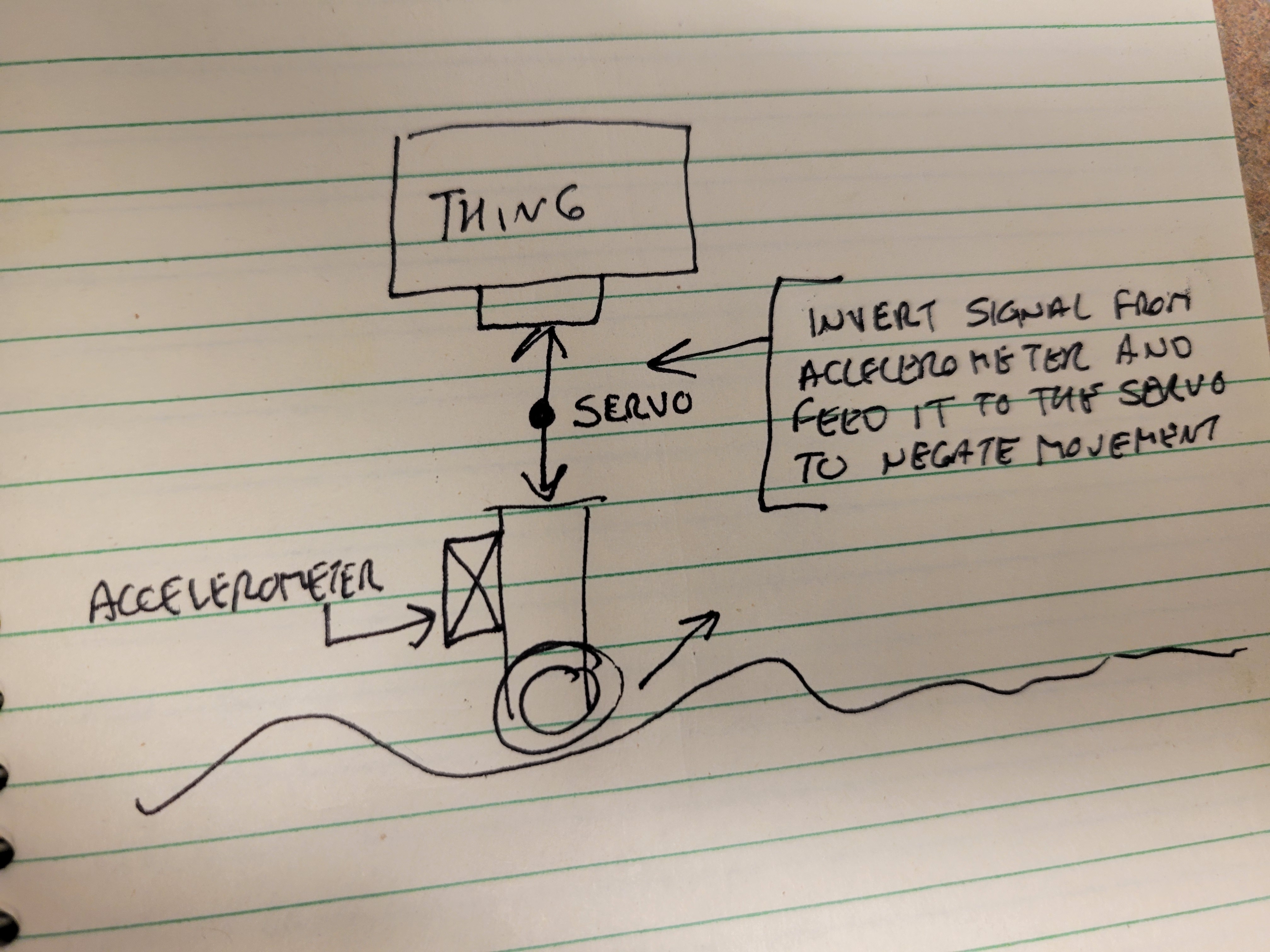
>>2933294This however might induce a feedback loop, would probably be better if the gyro/accelerometer was on the portion that's moving up & down, then invert the data from it to have the motor/servo negate the motion above.
>>2933294>>2933295A word of warning, I'm not a mechanical engineer, I design houses for a living. I could be completely wrong about everything I am saying. But it seems like a feasible solution based on my rudimentary knowledge about how this shit works?