>>16701138
>it's either assumed (or proven prior) that the two relevant vectors are perpendicular.
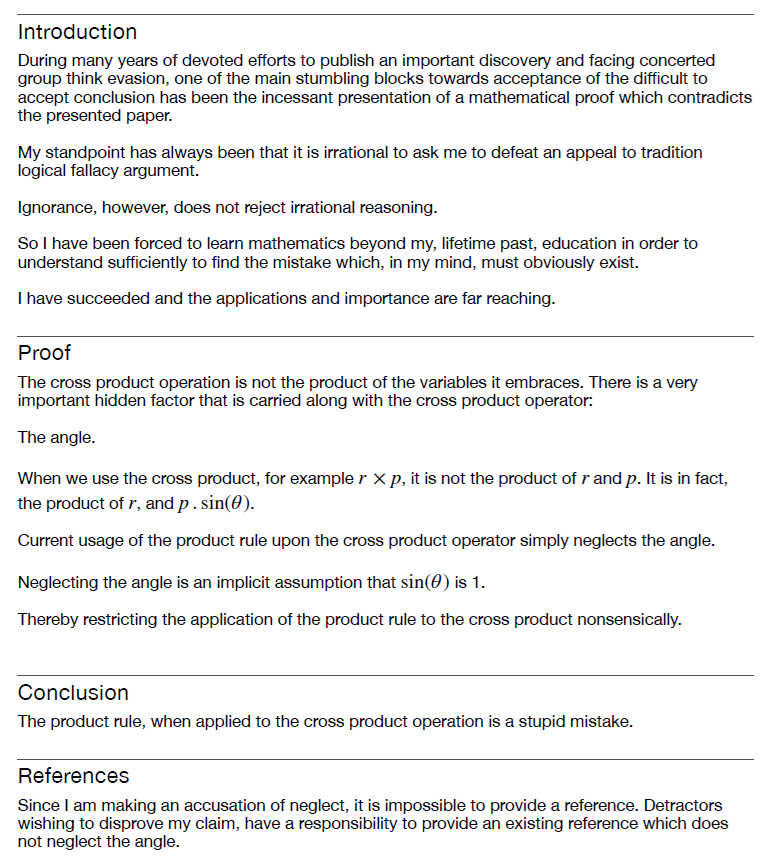
Nothing about the proof for applying a derivative to the cross product requires the vectors to be perpendicular.
Take:
[math] \vec{q} = \left(q_x, q_y, q_z\right)[/math]
[math] \dot{\vec{q}} = \frac{d}{dt}\left(q_x, q_y, q_z\right) = \left(\frac{d q_x}{dt}, \frac{d q_y}{dt}, \frac{d q_z}{dt}\right)[/math]
Let:
[math]\vec{a} \times \vec{b} = \vec{c}[/math]
[math]c_x = a_y b_z - a_z b_y[/math]
[math]c_y = a_z b_x - a_x b_z[/math]
[math]c_z = a_x b_y - a_y b_x[/math]
Taking the derivative:
[math]\dot{c_x} = \frac{d}{dt}\left(a_y b_z - a_z b_y\right)[/math]
[math]\dot{c_x} = \dot{a_y}b_z + a_y\dot{b_z} - \dot{a_z}b_y - a_z\dot{b_y} =
\left(\dot{a_y}b_z - \dot{a_z}b_y\right) + \left(a_y\dot{b_z} - a_z\dot{b_y}\right)[/math]
[math]{\left(\dot{\vec{c}}\right)}_x = {\left( \dot{\vec{a}} \times \vec{b} \right)}_x + {\left( \vec{a} \times \dot{\vec{b}} \right)}_x[/math]
From which you can generalize:
[math]\left(\dot{\vec{c}}\right) = \left( \dot{\vec{a}} \times \vec{b} \right) + \left( \vec{a} \times \dot{\vec{b}} \right)[/math]
If this is applied to the case of angular momentum, it's easy to see how Newton's Laws directly lead to conservation of angular momentum:
[math]\vec{F} = \dot{\vec{p}} = m\;\ddot{\vec{r}}[/math]
[math]\vec{\tau} = \vec{r} \times \vec{F} = \vec{r} \times m\;\ddot{\vec{r}}[/math]
[math]\vec{\tau} = m\;\vec{r} \times \ddot{\vec{r}} = m\;\left(\dot{\vec{r}} \times \dot{\vec{r}} + \vec{r} \times \ddot{\vec{r}}\right)[/math]
By the proof above:
[math]\vec{\tau} = m\;\frac{d}{dt}\left(\vec{r} \times \dot{\vec{r}} \right) = \frac{d}{dt}\left( \vec{r} \times \vec{p} \right) = \frac{d}{dt}\vec{L}[/math]
If [math]\tau = 0[/math] then [math]\vec{L} = [/math] constant.