My Advanced Realistic Humanoid Robots Project - #5
Last Threads:
https://warosu.org/diy/?task=search2&search_username=artbyrobot
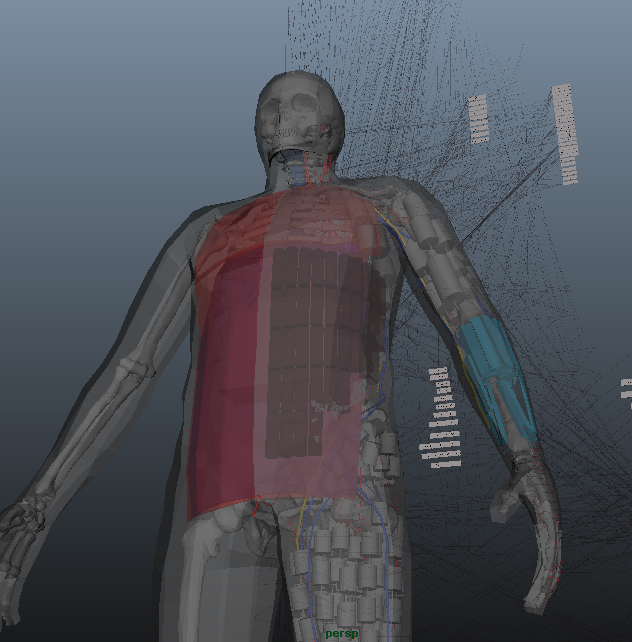
To begin: the project goal: I am working to make a series of humanoid robots. I am using a Biblical theme of naming the first 3 robots I make Adam, Eve, and Abel. The goal is for these robots to have human body inspired musculoskeletal systems, advanced AI, and that they look human and pass for human to a casual observer at least at a distance. They must be able to walk, talk, run, dance, do sports, do chores, manufacture products, and make more robots just like themselves if not even better. My aim is to build a single robot arm and head and then add sufficiently advanced AI to that arm and head to enable it to build the rest of its own body for me. This way I am delegating the work of building the majority of my first humanoid robot to that robot rather than doing that work myself - and this is to save me time.
In a like manner, my goal with the AI is to code just enough AI that the AI can begin coding itself and this way I don't have to code most of the AI myself because it will self create itself. I liken this to building a seed and that seed growing into a tree because for me to code that tree would take too long for me and just creating the seed would then save me time.
robotwaifutechnician
4/26/2025, 6:36:37 AM
No.2912366
[Report]
>>2912576
Its too many things at once. I hate that theres this notion that why bother with the robot if ai will maje it eventually. AI is a bloated datasate attached to a token predictor.
Artbyrobot
!!Cd/+jXhVZy7
4/27/2025, 5:55:24 AM
No.2912576
[Report]
>>2912605
>>2912366
I do think LLMs can help robot designers but it will take custom AI to start helping on anything manufacturing related most likely
robotwaifutechnician
4/27/2025, 9:59:46 AM
No.2912605
[Report]
>>2912633
>>2912576
youll want to look into nvidia groot
https://github.com/NVIDIA/Isaac-GR00T
that is for training adaptable movements training.
I havent looked much into into it but thats my understanding of what it is. For AI ive just played with nudenet lol. Also ideally thered be a simukation of the robot so it can be trained before its put into practice.
Lots of stuff to be done in the computer front thst doesnt realky cost money that should be done.
Artbyrobot
!!Cd/+jXhVZy7
4/27/2025, 2:51:36 PM
No.2912633
[Report]
>>2912605
NVIDIA groot sounds like maybe a good idea for most but probably not for me. I really need everything custom from the ground up so I know what I'm doing and have total control and power over outcomes and can optimize to my exact situation and uses.
Artbyrobot
!!Cd/+jXhVZy7
4/29/2025, 7:50:13 AM
No.2913048
[Report]
>>2913532
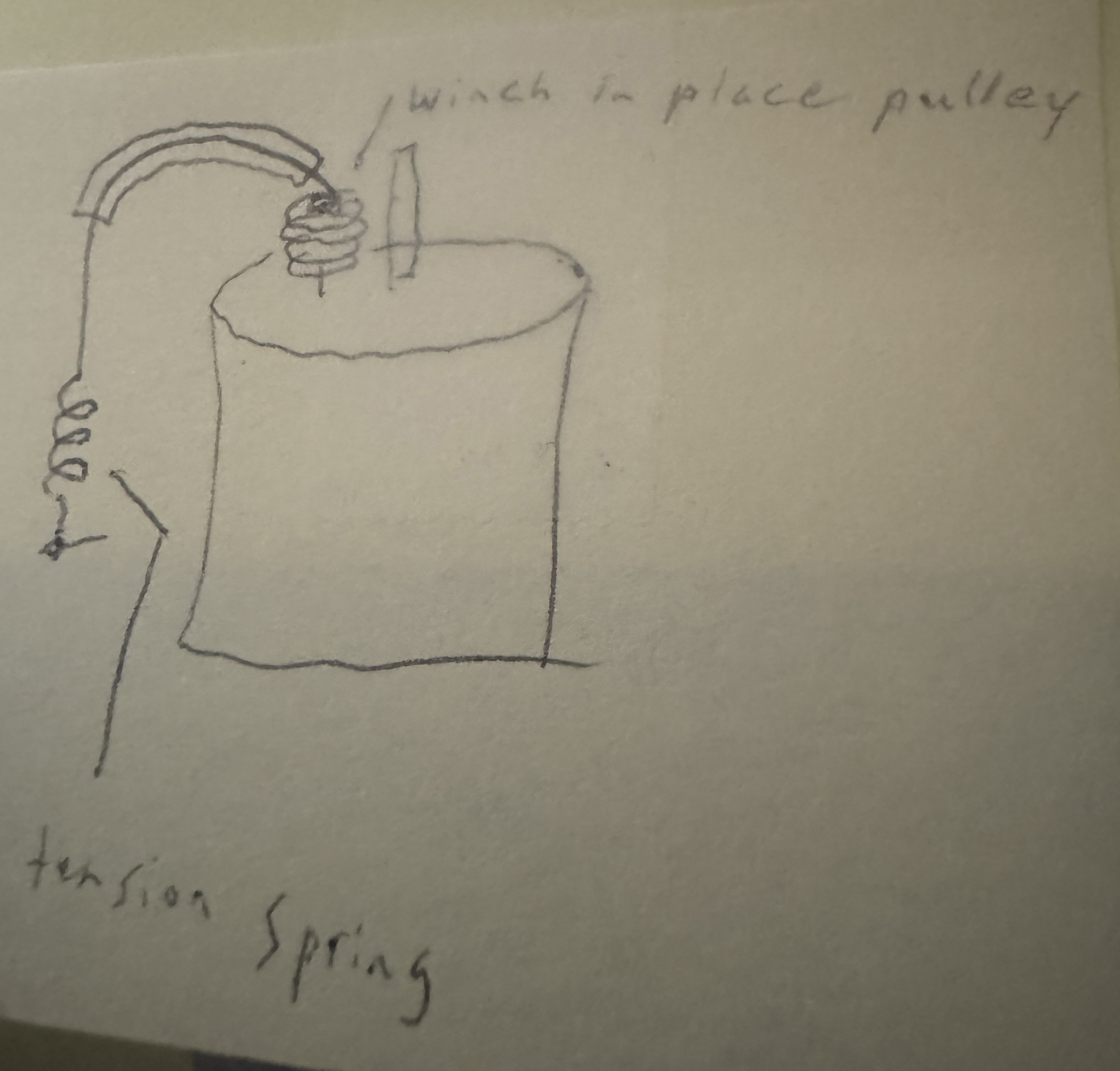
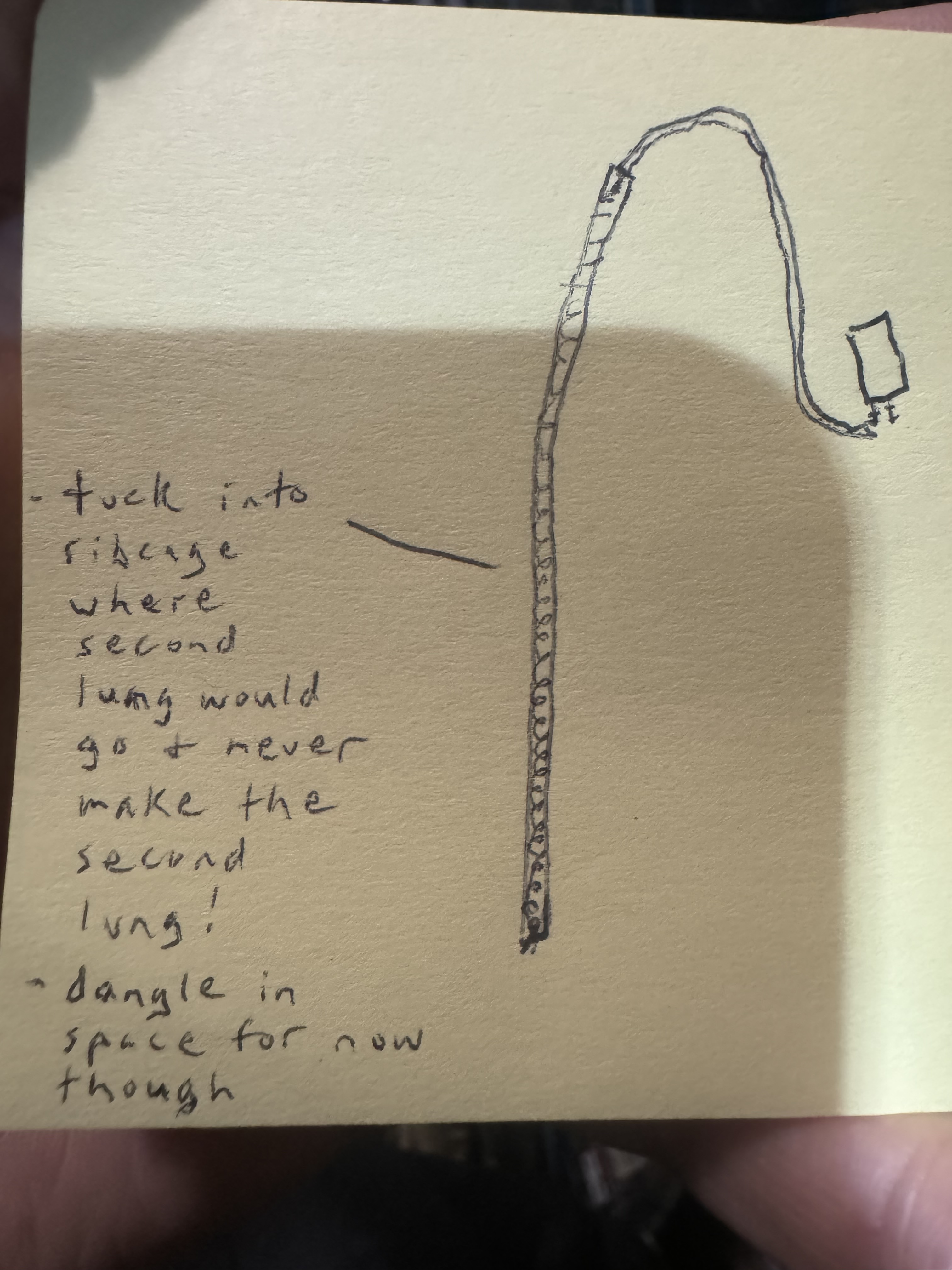
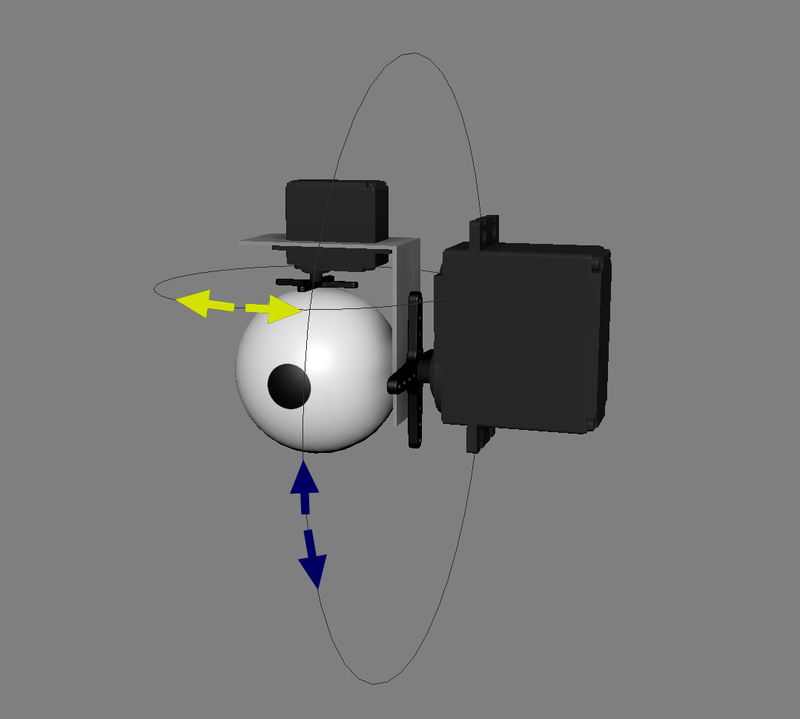
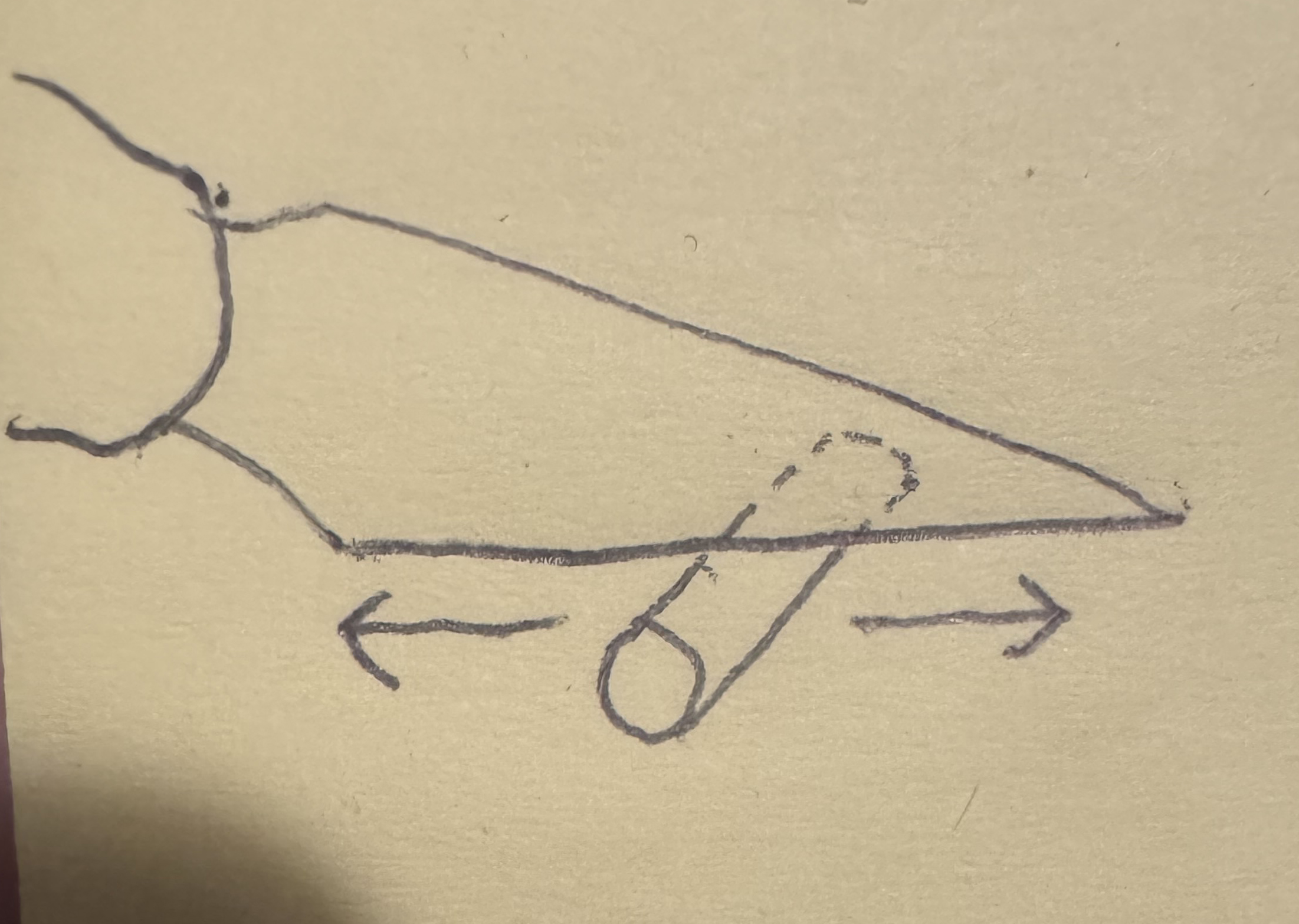
After further consideration, I'm scrapping using the elastic cord for a bracelet idea (as a tension spring for the winch in place pulley). The point of that was to use as little space as possible but I just don't trust it. I am not sure what material it is made of and my experience with rubber bands has always been dry rot issues. I am going with 2mm OD tension spring instead. It has to stretch 12.5" and so I'm using a 12.7" strip of it to start. That feels like a snug stretch but does comfortably reach the 12.5" of stretch needed. This brings its stretched total length to 25.2". I bought 3mm ID 4mm OD TPFE tubing to be its guidance tube for this. That arrives tomorrow and then I can begin assembly.
This 4mm OD guidance tube is a bit bulky and long for the arm IMO so I will relocate it to the torso since if I use this method for other motors these 4mm OD tubes will add up in space taken up fast. The arm can't house them - it's just too much space taken at that point for these. But the torso can house them in the back or sides I think. For now, since the torso is not yet attached, I'm going to place this tube ON the string suspended from my ceiling and treat that string as though it were to torso for now.
Artbyrobot
!!Cd/+jXhVZy7
4/30/2025, 4:16:24 AM
No.2913236
[Report]
Here is the tension spring in question from the previous post. I want this spring inside the tubing though which is not shown in the drawing of it.
Anonymous
4/30/2025, 6:21:38 AM
No.2913253
[Report]
>>2913537
>>2912365 (OP)
>In a like manner, my goal with the AI is to code just enough AI that the AI can begin coding itself
AI models are not code. You could create an AI model that can train an AI model, but that's essentially just automating the training process, which is trivial to do without AI. The hard part of training an AI model is acquiring the necessary compute and data, neither of which any existing AI can give you a meaningful amount of assistance with.
peteblank
4/30/2025, 10:01:12 AM
No.2913291
[Report]
>>2913292
i already posted where the bar is. If you can make a walking robot that can turn around and doesnt fall youd beat 99% of engineers.
robotwaifutechnician
4/30/2025, 10:04:11 AM
No.2913292
[Report]
Anonymous
4/30/2025, 10:43:17 AM
No.2913296
[Report]
>>2913297
>>2913538
How about you start a little smaller....
robotwaifutechnician
4/30/2025, 10:58:52 AM
No.2913297
[Report]
>>2952651
>>2913296
i was thinking of making about making an ecigarrete.
>>2912365 (OP)
I'm with you, I think.
>>2912422
I'm NOT going for "humanoid", in fact I don't yet know exactly WTF it might look like, but it will be on wheels, not "feet".
Right now I'm trying to sus out what might be folding position adjusting "legs" that while able to be positioned along circular path by some gearing, would also have "give" at any set position to also be road worthy suspension. Should be able have spring and damping of movement in both directions of the sweep.
Also trying to figure out, in addition to a fully Electronic wheel hub motor, a way to mechanically transmit power via chains, belts or shafts and gears, from a central source out to movable and STEERABLE legs and wheels.
Might end up with fully manual steering, and some belts that can handle some angle movement of pulleys, and if an increase in throttle gives some "steering feedback" that might be "acceptable" and just part of the new Motorsport. Heck, maybe having a power increase tend to straighten out steering would be desirable.
Might use something like this, but I'm fighting for distance across the axle and would rather have one of those "axle comes out only on one side" setups.
https://www.amazon.com/Electric-Scooter-Brushless-Gearless-Conversion/dp/B0CCP8NM6H/?_encoding=UTF8&pd_rd_w=z3ulV&content-id=amzn1.sym.255b3518-6e7f-495c-8611-30a58648072e%3Aamzn1.symc.a68f4ca3-28dc-4388-a2cf-24672c480d8f&pf_rd_p=255b3518-6e7f-495c-8611-30a58648072e&pf_rd_r=4FEG6Y5M6YMSBNHE0KQG&pd_rd_wg=FrjTU&pd_rd_r=0998d180-0d8c-4a6a-ba06-9d5ab8e42210&ref_=pd_hp_d_atf_ci_mcx_mr_ca_hp_atf_d&th=1
>>2913048
4mm OD sounds real small for "arm" even if that was one for every finger and two for thumb.
I can't figure out what you are talking about.
Looks like you got lots of inline servos to mimic muscle contraction.
One of the avenues I'm looking at is cords, belts, cables, chains etc from a central power source with some sort of clutching.
Might take a look at this.
https://braceworks.ca/2017/02/13/health-tech/thubber-stretchable-thermally-conductive-rubber-for-heated-garments-and-robot-muscles/
https://estat.tech/wp-content/uploads/United-States-Patent-10355624.pdf
https://www.electronicspecifier.com/industries/robotics/electroadhesive-clutch-substitutes-conventional-ones-in-robotics
But I'd probably want to go with manual clutching, probably something that could maniplate several at once from handgrip. Like a grip with "keys" for each finger, or at least a few fingers, or several diff inputs from applying diff angles, or both fingers and angles.
Artbyrobot
!!Cd/+jXhVZy7
5/1/2025, 7:04:12 AM
No.2913537
[Report]
>>2913542
>>2913253
I'm not using AI models I'm using my own custom AI and rules based learning and rules based AI. So my AI will create new rules as it learns and write them down and later act according to the rules it made for itself. Throw out any thought of neural networks or LLMs or any other popular current AI trend I am using none of them and understand them very little and deliberately so. I am not going that direction but an entirely new direction of my own choosing. So all principles you mentioned are not applicable in any way. You are speaking on technology and its use of tech I am rejecting and not using for this at all.
Artbyrobot
!!Cd/+jXhVZy7
5/1/2025, 7:06:50 AM
No.2913538
[Report]
>>2913296
that's usually a good suggestion for most people but I don't want to go that route. Is building progressively harder robots starting from total basic necessary? I say no. After all, my job right now is to move a singel finger joint. Building 100 robots to get to the point of moving a single finger is not necessary. And once taht finger moves well I can actuate the next single joint and so on. No need to build many easier robots first then. We can think of building taht single finger joint as building a single easy robot as a sub robot within the overarching robot. Each joint I actuate is my beginner robot project completed. So I skip all the cars and spiders and w/e and just go right into my dream project this way.
Artbyrobot
!!Cd/+jXhVZy7
5/1/2025, 7:11:38 AM
No.2913539
[Report]
>>2913786
>>2913527
you'd probably have to say the speed and size you want it etc to give us more idea on how to help. you can also ask for assistance on r/robotics
Artbyrobot
!!Cd/+jXhVZy7
5/1/2025, 7:15:07 AM
No.2913540
[Report]
>>2913527
although this might not help you, I did consider right away what if you used e-bike kits? Those motors are strong and go fast. Build right into a light weight wheel. I replaced my mountain bike wheel with one and now its a ebike. Was super easy to install. Came with the bldc motor controller and throttle and everything. Was also fairly cheap.
Artbyrobot
!!Cd/+jXhVZy7
5/1/2025, 7:16:25 AM
No.2913541
[Report]
>>2913532
its way more than one for every finger. Each finger will have 4 and the thumb will have 6 or more and the wist even more. I'm creating a FULL degrees of freedom finger with every single joint having actuators assigned to it for every direction individually.
Anonymous
5/1/2025, 7:37:02 AM
No.2913542
[Report]
>>2913545
>>2913537
Okay, so instead of cutting edge tech your plan is to recreate a 70s-era expert system? What magical insight do you have that will make it any less of a dead end than it was 50 years ago?
Artbyrobot
!!Cd/+jXhVZy7
5/1/2025, 8:05:39 AM
No.2913545
[Report]
>>2913550
>>2913875
>>2945092
>>2913542
I don't know what they did 50 years ago with expert systems or what bottlenecks they faced. I also don't know if they ever built their expert system to eventually make its own rules and expand on itself. If they did not, then that is why it was so limited and never expanded like mine will. So I can't speak on that. I just LOVE expert systems or rules based systems (same thing). It is the only way I would even consider doing. I feel its potential is limitless as long as it can form its own rules and thereby evolve its own behaviors.
Anonymous
5/1/2025, 8:35:06 AM
No.2913550
[Report]
>>2913587
>>2913545
give an example of a rule your system has created
Artbyrobot
!!Cd/+jXhVZy7
5/1/2025, 3:10:27 PM
No.2913587
[Report]
>>2913854
>>2913550
It's not making them yet the system is in very early foundational development which itself is on hold completely until I get the hardware of the arm and head done and only then will I resume the very early development. You are asking for a late term near end stage example of code that is already near the finish line which is not possible to show and many many years away..
Anonymous
5/2/2025, 8:30:19 AM
No.2913786
[Report]
>>2914869
>>2913539
all I see on 4Chan is >>>/r9k/
and of course "mecha" cartoons.
I'm thinking of about 2-3ft legs, of total of 4 for normal vehicle of about 600lbs total weight including payload, so the suspension could handle normal roads at 45mph with legs parallel to road. At least 6" of travel, similar to motorcycle.
Positioning Strength should be able lift the 600lb body using one leg starting from parallel to ground (max most difficult angle). PS can be fairly slow, up to maybe 7 seconds to go from 0 to 90degs. Load would become lighter as leg becomes more vertical to ground.
Anonymous
5/2/2025, 5:57:37 PM
No.2913854
[Report]
>>2913587
I'm glad 4chan is back. I've been wondering how your project was going, Art.
Anonymous
5/2/2025, 7:02:42 PM
No.2913875
[Report]
>>2914011
>>2913545
What makes you think they never considered something so obvious?
Artbyrobot
!!Cd/+jXhVZy7
5/3/2025, 8:14:49 AM
No.2914011
[Report]
>>2914609
>>2913875
I have no clue if they considered it. I have and I'm doing it and it's the key to success if you want to go well beyond just hand coding every rule.
robotwaifutechnician
5/5/2025, 12:22:17 PM
No.2914501
[Report]
>>2914517
torque of the hip motor=weight of the robot*length of the leg*sin(45)
if a robot is 1 kilogram and the length of the leg is 1 meter then that meabs
1*1*sin(45)=6.94 newton meters
Which means it can be powered by mg996r servos at high voltage
i came accross that formula on youtube
that is only part of it though
Anonymous
5/5/2025, 1:52:08 PM
No.2914517
[Report]
>>2914501
er 0.6 meters*0.8 kilograms*sin(45)=0.42 nm
https://www.youtube.com/watch?v=NimROnJeQDY
This guy made a pretty sick robot hand, people here were shitting on your joints but he's basically done it with servos and string.
robotwaifutechnician
5/5/2025, 3:04:46 PM
No.2914533
[Report]
Anonymous
5/5/2025, 7:43:34 PM
No.2914609
[Report]
>>2914739
>>2914011
It would be quite efficient to look at past failtures and important problems to solve.
Have you considered useing a Hybrid system? As far as i know most humans act based on rules (morals and goals) and statistical evidence (memory).
So a hybrid system sounds like it would produce most human like behaviour?
You would have to implement a system to evaluate an action and decide if that action becomes a "memory". Very similar how you would have to decide new rules...
Anonymous
5/5/2025, 8:38:10 PM
No.2914625
[Report]
>>2914740
Art you should come tell us about your project over on /g/.
>>>/g/105168159
I think lots of people there would be interested to hear about it and could offer some advice and perhaps do some of the busywork for you.
Artbyrobot
!!Cd/+jXhVZy7
5/6/2025, 6:50:38 AM
No.2914736
[Report]
>>2914524
nice project he did a good job.
Artbyrobot
!!Cd/+jXhVZy7
5/6/2025, 6:51:38 AM
No.2914737
[Report]
>>2914589
thanks for that link. I've read their whole catalog and started posting my project over there a little over a year ago. I have like 70 posts there.
Artbyrobot
!!Cd/+jXhVZy7
5/6/2025, 6:54:10 AM
No.2914739
[Report]
>>2914609
not sure what you mean by hybrid system but the examples you gave are definitely stuff I'm planning to have in mine.
As far as looking at past failures being efficient I agree. However, I am limiting how deep I go into understanding past AI approaches to ensure I find my own way and don't just follow others path to the same deadend. We tend to copy a bit if we already fully saw someone elses work in detail like that I think.
Artbyrobot
!!Cd/+jXhVZy7
5/6/2025, 6:57:52 AM
No.2914740
[Report]
>>2915229
>>2915307
>>2914625
thanks for the invite I'll think about it. I prefer a dedicated build log thread though and I'm not sure doing all my build updates in someone elses thread makes sense plus then I'd be uploading my build log to 4chan in two places instead of containing it all here which seems maybe excessive for a single website. I'm not sure if it is good form to repost a project in two separate main categories on 4chan. Is that acceptable practice on 4chan?
Anonymous
5/6/2025, 7:48:02 PM
No.2914868
[Report]
>>2913527
What exactly are you trying to build? Wheeled robots are MUCH easier to build than robots with arms or legs. Arms and legs have to support their weight and require special actuators.
Have you considered just making a power wheels toy self driving? Most expensive part is a fat servo to do steering.
>transmit power via chains, belts, shafts and gears
To do what? Why do you need this if you have hub motors?
>>2913532
There's this, but even with electrostatic clutches, switching delays are comically slow
https://arxiv.org/abs/2501.08469
Like 400 ms.
Anonymous
5/6/2025, 7:51:04 PM
No.2914869
[Report]
>>2913786
Why do you need legs?
>600lb
That's a tall order
>can be slow
If it's walking or acting as an active suspension, it needs to be fast, otherwise, what's the point?
Anonymous
5/7/2025, 11:43:11 PM
No.2915229
[Report]
>>2915857
>>2914740
>Is that acceptable practice on 4chan?
If it's relevant to both boards, then yes I think it's perfectly acceptable. What you're doing here is certainly an attempt at technology, which is /g/'s topic.
robotwaifutechnician
5/8/2025, 3:05:33 AM
No.2915285
[Report]
>>2915482
im just going to record myself gambling and drinking fruity vodka with coke. Hows that for an upcoming robot waifu video?
Anonymous
5/8/2025, 4:01:55 AM
No.2915307
[Report]
>>2915857
>>2914740
I wouldn't go so far as to do the whole 'build log' on /g/
but, when you are doing something that involves programming definitely consider posting what you are doing over there
also you can always cross-board link back to this thread for added context
Anonymous
5/9/2025, 1:24:09 AM
No.2915482
[Report]
>>2915586
>>2915285
How bout you put the bottle down and get a job hombre?
robotwaifutechnician
5/9/2025, 4:34:03 PM
No.2915586
[Report]
>>2915482
i am 36 anyways
Artbyrobot
!!Cd/+jXhVZy7
5/10/2025, 12:30:56 PM
No.2915857
[Report]
>>2915229
>>2915307
thanks for the thoughtful replies to my inquiry.
Artbyrobot
!!Cd/+jXhVZy7
5/10/2025, 12:32:01 PM
No.2915858
[Report]
>>2915967
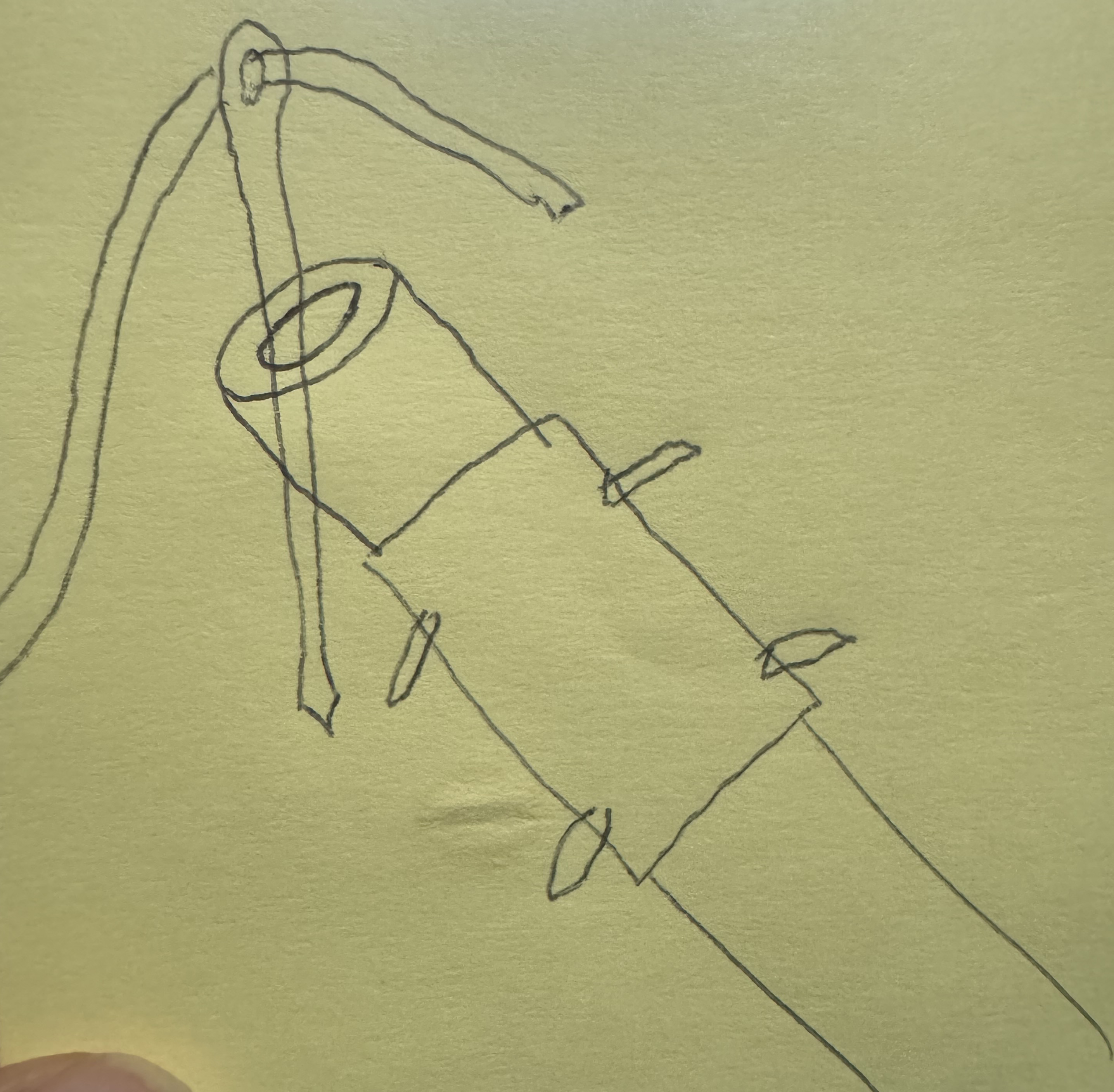
Good news: I had mentioned before I was planning to use 2mm OD tension spring for the winch in place pulley tension solution but once I got the 3mm ID 4mm OD PTFE tubing to go over the spring, I saw that the 4mm was just WAY too big once you multiply that out to 300 motors. 300 of 4mm OD tubing starts to take up a massive area at that point and I struggled with that. I MUST be miserly on space taken up by parts to get all the crap I need to fit in there to fit in there! Anyways, I fortunately discovered that you can buy tension spring down to 1mm in OD! I was unaware of this before now! You can find it if you search "0.2x1.5x1000mm tension spring" where 0.2mm is wire thickness, 1.5mm is OD, 1000mm is length. So I ordered 1mm OD tension spring and 1.5mm OD tension spring to test and see what seems best. If the 1mm OD spring seems reliable to me, I'll go with it. Anyways, since the spring is now smaller, I can use also a smaller PTFE tubing to house the spring so I ordered uxcell PTFE Tubing 1.8mm ID x 2.2mm OD off amazon. 2.2mm OD tubing compared to 4mm tubing is SHOCKINGLY smaller when you look at them. So it will be WAY more space efficient now.
Here's my updated tension spring concept drawing:
robotwaifutechnician
5/10/2025, 4:52:40 PM
No.2915901
[Report]
how about this.
i make the small scale robot walk then i paywall the code behind my patreon and you cite me on your research paper.
Anonymous
5/10/2025, 10:52:49 PM
No.2915967
[Report]
>>2916156
>>2915858
Dude, this is exactly what people have been telling you for months now. You have too much shit crammed into the chest. Why didn't you just listen and get this insight months earlier so you could start building on it?
I have a question about your 300 motors too. I understand you want them to pull wires to reduce noise, but won't they just cause noise anyway from wherever you're storing them? I don't see how it helps when you still need to carry the motors around with the robot.
Anonymous
5/10/2025, 11:34:04 PM
No.2915969
[Report]
>>2915981
>>2916156
robotwaifutechnician
5/11/2025, 12:25:16 AM
No.2915981
[Report]
>>2915969
pneumatic actuators are noisy and jerky. impressive still cause i dont know where the compressor tanks are but the real breakthrough would be soft polymer actuators.
Artbyrobot
!!Cd/+jXhVZy7
5/11/2025, 12:59:21 PM
No.2916156
[Report]
>>2916204
>>2915967
>people told you to have less stuff in torso
um not that I read. And if anyone did, nobody had any suggestion as to what I could remove to make more room. Not sure what you refer to here. Quotes? Prove it.
>won't motors make noise
brushless motors make a very small amount of noise but I think its hardly noticeable. Cheap gears chattering is what gets super loud. Low downgear ratio harmonic gears or planetary gears taht are non-diyable and expensive aren't too bad I guess but most cheap hobby level gears are unacceptably loud. My goal was a cheap downgear solution with high gear ratio to open use of cheap high speed low torque motors taht you can use a ton of in a humanoid all while downgearing with very low noise output. Solving a TON of challenges in the making by this approach if it can be pulled off. And I feel I'm getting extremely close to doing just that. The tradeoff is perhaps higher maintenance. But engineering tradeoffs have to come somewhere that's how engineering works. You can't have everything. You prioritize certain things and make sacrifices on some other things. Depends on your goals. I want quite and full DOF and high speed and high stength and low cost. But then I can't ALSO have low maintenance and low complexity. So the latter 2 were my tradeoff concession I had to make.
>>2915969
yes I saw their project. Looks cool but too loud so its non-viable. Told them this for years. And yes it is too jerky too.
Anonymous
5/11/2025, 5:51:57 PM
No.2916204
[Report]
>>2916598
>>2916156
I can go look in the archives, but you'll just say that no one had any suggestions in place of it. It's difficult to give you suggestions, because the only suggestion that would work is to scrap all of your dumb ideas and start over, and you're too proud to ever consider doing that.
Where are you going to put those 300 motors by the way? 300 motors will take up a lot of space. This should be obvious too, but those "quiet" motors will be 300 times louder if you have 300 of them.
Artbyrobot
!!Cd/+jXhVZy7
5/13/2025, 1:05:06 AM
No.2916598
[Report]
>>2916638
>>2916896
>>2916204
>where will you put the 300 motors
*doesn't look at the many CAD images I've posted showing all 300 motors carefully placed already* *Meanwhile says all my ideas are stupid while failing to even observe basic designs I've already solved*
>>2916598
How do you plan to control these 300 motors?
Artbyrobot
!!Cd/+jXhVZy7
5/13/2025, 8:24:23 AM
No.2916653
[Report]
>>2916710
>>2916638
by controlling one motor the industry standard way and then rinse repeating that proven control method on the next motor and so forth for the rest one at a time.
>>2916653
>Industry standard way
PLCs? Do you have any idea how bulky that's going to be?
Artbyrobot
!!Cd/+jXhVZy7
5/13/2025, 11:45:57 PM
No.2916770
[Report]
>>2916989
>>2916710
never heard of a PLC but by industry standard way, I mean using bldc motor controllers and arduino megas and stuff like that but all custom and miniaturized
>>2916598
You need to stop calling those CAD drawings, BTW; those are mockups. Before you ask, I will tell; a a drafted design can be given to someone else so he can reproduce the object. None of the things you've posted could be used to reproduce anything.
What is the reason you use a human skeleton? I understand that its easier but it would be a lot more performant to use conventional mechanical joints with bearings and shit?
And if you are going for anatomical accuracy you would have to use hydraulic muscles?
it just doesn't make a lot of sense..
also
>>2916896 is right you need to learn how to make a proper drawings your sketches are very hard to read
i would not say megas are the industry standard but it would prob work... your just going to need a lot of megas. perhaps switch to nanos for size or just use a stronger CPU...
oh and you will need some active cooling for all these electronics cramed into one space
last: create a summary i ain't reading the whole fucking archive
Artbyrobot
!!Cd/+jXhVZy7
5/14/2025, 7:45:37 PM
No.2916959
[Report]
>>2917133
>>2917150
>>2916896
disagree. easily can be reproduced videos and photos show everything in detail along with the cad. easy peasy.
>>2916937
human skeleton reasoning is littered all over here and most links to other places project was discussed.
megas are more space conserving than nanos when deadbugging or freewiring or w/e you'd call this. no board, just chip.
cooling was discussed in length already.
summary is the op post.
Anonymous
5/14/2025, 8:52:35 PM
No.2916988
[Report]
>>2951181
>>2916638
>>2916710
Just in case there was any doubt in your mind, the real answer is that he doesn't know. There's a lot he doesn't know.
Anonymous
5/14/2025, 8:53:36 PM
No.2916989
[Report]
>>2916770
>industry standard way, but custom
wat
Anonymous
5/15/2025, 1:10:10 PM
No.2917132
[Report]
>>2917133
>>2916937
"easily can be reproduced"
>No scale references
>Shitscribbles to be rivaled by a 5 year old with a BIC
>Potato cam photos
...riiiight.
Anonymous
5/15/2025, 1:11:14 PM
No.2917133
[Report]
Anonymous
5/15/2025, 4:06:41 PM
No.2917150
[Report]
>>2917278
>>2916959
>easily can be reproduced
You haven't even produced it. How can you possibly be making claims about reproducing it?
If it's so easy to reproduce, why has it taken you 10 years to glue some fishing line to a sewing bobbin?
Artbyrobot
!!Cd/+jXhVZy7
5/16/2025, 3:22:53 AM
No.2917278
[Report]
>>2917847
>>2917150
it takes long because I work on loads of other stuff rarely finding time for it, the design is regularly changing to progress is swept away repeatedly when it is made, scope creep, evolving, etc. But what I do publish is easily reproduced.
Artbyrobot
!!Cd/+jXhVZy7
5/16/2025, 4:32:18 PM
No.2917358
[Report]
>>2916937
btw, it's not like I'm vehemently opposed to conventional mechanical joints and bearings and stuff as a alternative to a human skeleton. In fact, I'm building one of my robots with just that, a steel mechanical skeleton robbed from a sex doll and modified for robotics usage instead. Here's a video update on that particular skeleton and project:
https://www.youtube.com/watch?v=PSg1Z5q5Nno
Anonymous
5/18/2025, 7:55:20 PM
No.2917847
[Report]
>>2917952
>>2917278
Alright, well you've "published" your model of a bunch of motors stuffed into a human body mesh. Why don't you go ahead and easily (re)produce it? I know you're really busy being a NEET who mooches off his parents, but it's easy right? So you should be able to do it.
Artbyrobot
!!Cd/+jXhVZy7
5/19/2025, 3:16:03 AM
No.2917952
[Report]
>>2917983
>>2917847
the challenge is not mounting the motors the challenge is custom miniaturized downgearing with no special equipment used to make it that others can make for their own DIY humanoids. Iterating through that has been alot. Plus I have alot of other things I do so don't work on this much.
Anonymous
5/19/2025, 5:22:25 AM
No.2917983
[Report]
>>2918118
>>2917952
So it's not reproducible then. You've posted "diagrams" of your downgearing system too, so don't worry, you don't have to iterate through that anymore, just reproduce it.
Artbyrobot
!!Cd/+jXhVZy7
5/19/2025, 7:10:47 PM
No.2918118
[Report]
>>2951182
>>2917983
motor placement is reproduce-able and that's all I did CAD for for the most part. Downgearing is not in CAD and is a separate challenge. Modeling and placing all motors is the biggest space constraint problem which is why it had to be done in CAD in advance. Space efficient silent downgearing needs to be mindful of volume taken but not the the extent is needs CAD for all of it. Although I did block out most of it in CAD at least for the hand pulleys. Reproducing the pulleys will be easy once the design is finalized. Videos will walk through the whole builds. Drawings of downgearing have been coming as soon as new designs come in and not all have been tested so once they have, videos will document the construction and fill in gaps of details the drawings glossed over. Then all phases will be easily reproducible.
robotwaifutechnician
5/20/2025, 3:37:15 AM
No.2918217
[Report]
>>2918237
Anonymous
5/20/2025, 5:42:54 AM
No.2918237
[Report]
>>2918238
>>2918217
Is this real or some sort of AI shit? How do the eyes work?
robotwaifutechnician
5/20/2025, 6:01:48 AM
No.2918238
[Report]
>>2928902
>>2918237
lol ofc its ai the mouth gives it away.
>how do the eyes work
pic related is one example but theres more than one way to skin the cat.
Artbyrobot
!!Cd/+jXhVZy7
5/22/2025, 11:45:35 PM
No.2918946
[Report]
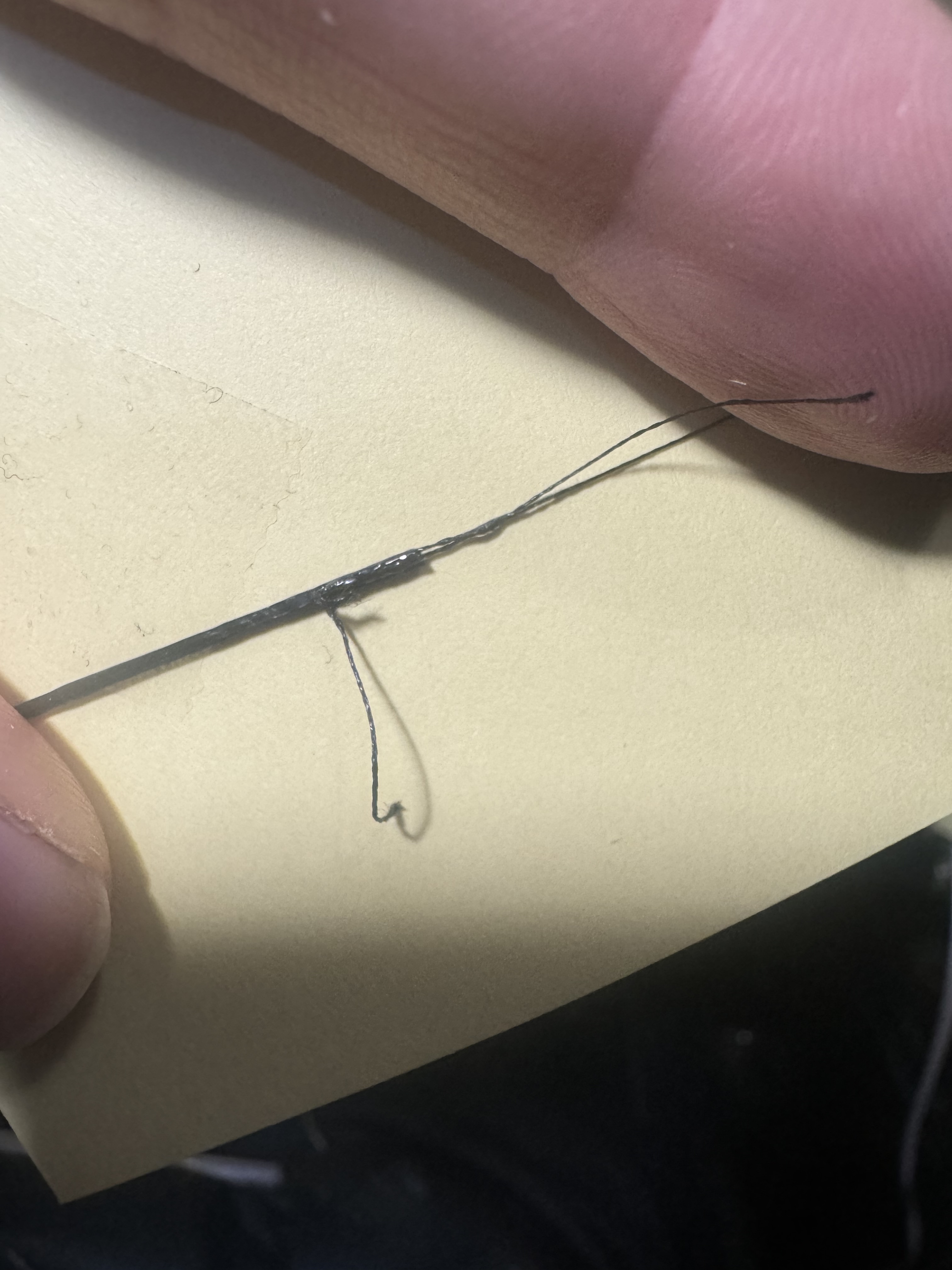
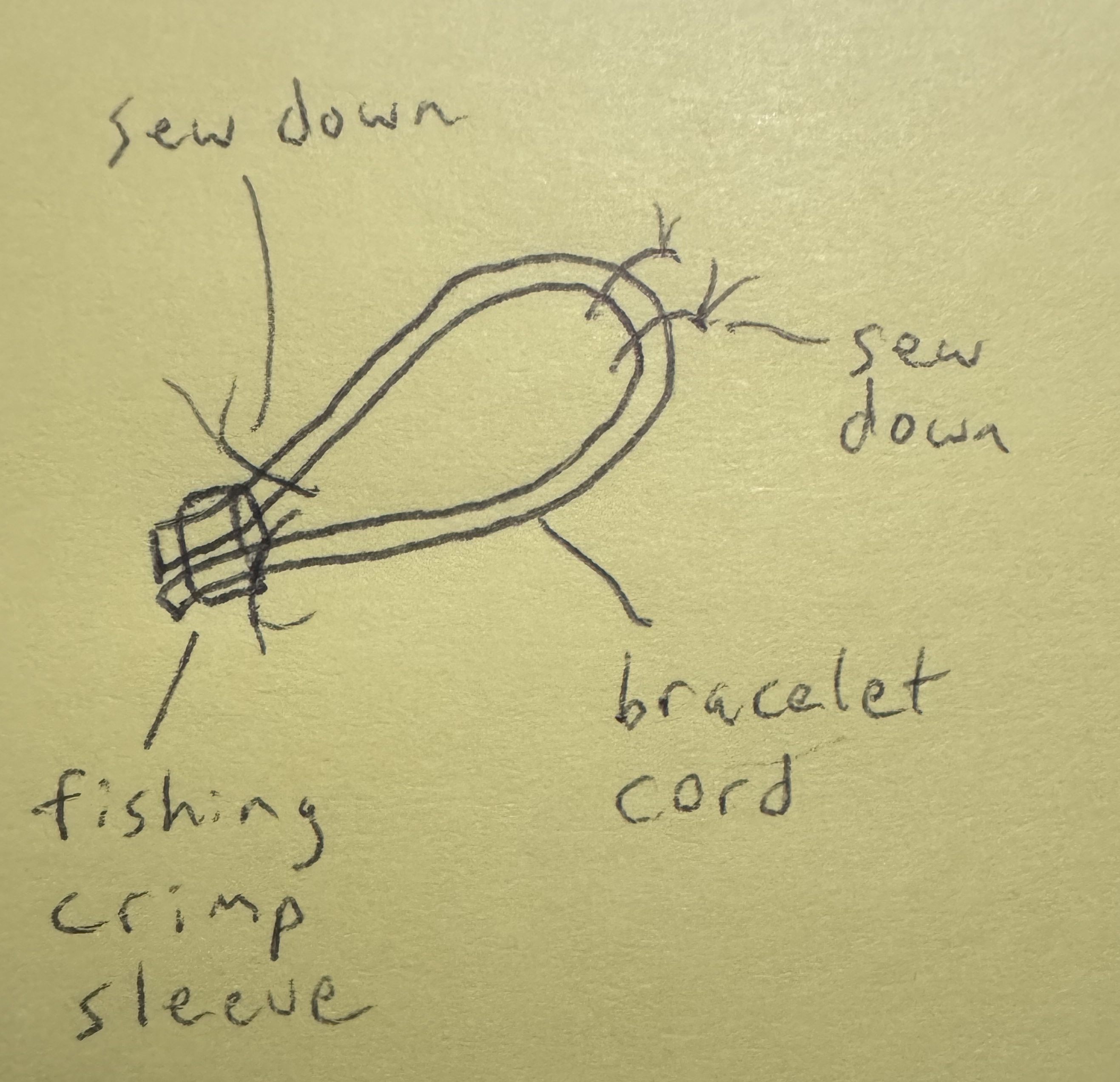
Ok so I currently have an order for 0.2x1x1000mm tension springs stuck in customs for weeks and placed another order just today for the same in hopes it goes through faster. But at $9 for a single spring that is 3ft long, I am feeling RIPPED OFF on price. It is bullcrap. All relating to the tariff nonsense. So I decided today to pivot and just roll with the elastic band in place of tension spring. It's a jewelry making elastic band I bought some time ago in a roll. WAY cheaper at $0.03 for 3ft instead of $9 for 3ft. That's 99.7% off! Talk about a discount! The issue I had before when I looked into this option was the tie-off point. I would need a way to tie PE fishing line to the end of the elastic band without the tie point being bulky. Well I figured out a way to do it without any bulk at all! See I want this to fit into my 1.8mm ID PTFE tubing to keep size down. My solution was to just glue the fishing line lengthwise directly to the elastic band. No knot at all. No turns at all. Just literally lay it on top and glue it down flush. I figured about 6mm length of joint would be solid. And I did this on both sides with my PE fishing line. I used 0.08mm 6lb test braided PE fishing line for this. So now I have two fishing line segments coming off the end of it for double the strength of this connection. But I only wanted one piece of fishing line to go the distance to attach to the motor end so I twisted the pair of fishing line segments together and glued the twisted pair with 401 glue then cut one of the two away leaving just one of the pair to go the distance to the winch in place pulley that this is all supposed to tension for me.
Artbyrobot
!!Cd/+jXhVZy7
5/22/2025, 11:46:47 PM
No.2918947
[Report]
I will use this string and elastic band method for now as I wait on springs and stick with this method for at least this first motor actuator setup for now. If the elastic bands don't last, we'll upgrade to the metal springs later on during maintenance or w/e.
Note: the total length of the elastic band I am using for this is 2ft and it stretches to 3ft snugly without too much force. I'm just going by feel and instinct for this measurement. If I were to go 1ft with 1ft of stretch, the stretch is more intense and the pull is harder. But I don't think I need much pull for just tensioning the winch in place pulley and I also think the more tension you place the more wear and tear on the elastic band which will shorten its lifespan. So playing it conservatively with the 2ft length selection for now.
Note: to apply the 401 glue I used an exacto knife handle with a sewing needle in place of the xacto knife blade and the tip of the sewing needle acts as my precision glue applicator.
Artbyrobot
!!Cd/+jXhVZy7
5/26/2025, 6:11:29 PM
No.2919804
[Report]
The 1mm OD springs just came in the mail now that I've already switched to elastic bands. Oh well I'm sticking to the elastic bands and springs only for future actuators if ever. They are awefully expensive right now IMO.
Artbyrobot
!!Cd/+jXhVZy7
5/30/2025, 5:27:03 PM
No.2920755
[Report]
>>2922195
https://www.youtube.com/watch?v=T-NCFSEHTnM
This is some inspiring stuff. Elon's team is crushing it! Too bad they aren't going for realistic human passing robots like me. Little to nothing I can use from their design in my own work.
Artbyrobot
!!Cd/+jXhVZy7
6/5/2025, 12:11:26 PM
No.2922170
[Report]
Sorry for lack of updates lately I've been swamped with work. My simple next goal is just attach the micro tubing near the motor winch in place pulley and run the tensioning string through that out to near shoulder. I think I'll connect that up to my elastic band and run that up to ceiling of room for testing only.
>>2920755
that dancing robot is fake. why dont you look at its feet? and if you think its real how long can that robot dance for?
Anonymous
6/6/2025, 1:08:57 PM
No.2922370
[Report]
>>2922195
>why dont you look at its feet?
What about them?
>how long can that robot dance for?
Atlas is good for an hour, I would assume one of the leaders of EV tech could get at least that much out of their batteries.
Artbyrobot
!!Cd/+jXhVZy7
6/10/2025, 7:27:42 PM
No.2923248
[Report]
>>2923423
>>2922195
first, it's not fake. Second, humanoids can operate neverendingly if you do one single solution I came up with: you swap out battery backpacks each time it gets low. Internal batteries will operate the robot while you swap in the new backpack. You always have a few backpacks charging while one is running on the humanoid's back. This way you never have ANY robot downtime needed.
Anonymous
6/11/2025, 1:15:45 PM
No.2923423
[Report]
>>2923439
>>2923248
Flawed plan (at least with current battery tech). Example: Spot has a runtime of @ 90 mins, but a charge time of 2 hours to 100% (1 hr gets you 80%). Presume Atlas/Optimus/Your robot shares the same charge ratio (no reason to think it won't; they're all using LiPo banks of some flavor). So to get through a single 8 hr workshift, you don't need "a few" batteries; you need 7 spares per robot AND an attendant to swap them on the hour just to get through an 8 hour shift (yes, it's entirely possible that the initial robo-revolution will CREATE jobs).
Artbyrobot
!!Cd/+jXhVZy7
6/11/2025, 3:25:42 PM
No.2923439
[Report]
>>2923423
first, no, you don't need an attendant to swap them, the robot can swap them himself. That's the whole point of the humanoid is it does its own work and your work too. Otherwise, if it can't even swap its own batteries it is utterly worthless and useless. It also has to do its own maintenance for crying out loud so battery swaps is a trivial thing for it comparatively.
Now as far as your 7 batteries for 8 hours claim, you will need to recalculate. If battery 1 lasts 90 min and takes 2 hours to charge, then battery 2 lasts second 90 min and battery one is 30 min from full charge. So battery 3 takes us third set of 90 min and by that time battery 1 is fully charged and battery 2 is 30 min from full charge. So it can swap to battery one when battery 3 runs out. When battery 1 is empty, battery 2 has been full for past hour and battery 3 is 30 min from full. So your math was trash.
You should get in the habit of once every week or two weeks writing up a status report - make sure the time interval is consistent so you get a feeling for how much progress has been made and the time spent to make it.
Anonymous
6/11/2025, 9:35:34 PM
No.2923502
[Report]
>>2923504
>>2923445
>Artbyrobot
>Progress
Anonymous
6/11/2025, 9:41:14 PM
No.2923504
[Report]
>>2923502
Shhh anon that's kind of what I was hinting at, but trying to be a little less rude about it.
It's been so long and yet the "hand that will assemble the robot which will improve upon itself" seems to be... a piece of string connected to a spring pretty much.
>>2912365 (OP)
>>>/vt/100992514
Better hurry up the development or you'll be overtaken.
robotwaifutechnician
6/12/2025, 2:46:33 PM
No.2923669
[Report]
>>2923672
>>2951183
>>2923505
dont make me flex what ive done so far chump
>>2923669
I am begging you on my hands and knees to flex anon
robotwaifutechnician
6/12/2025, 3:13:20 PM
No.2923676
[Report]
>>2923678
>>2923681
>>2951184
>>2923672
lol okay pic related is a talking head i also made a robot hand
https://youtu.be/xkP54ScFFRU?si=1sDJvocBAnn_dgWP
https://youtu.be/J_xvPFFo6-4
ive also remade the mold to finally fix the face
robotwaifutechnician
6/12/2025, 3:21:44 PM
No.2923678
[Report]
>>2923676
here is the new mold im going to try a silicon caulk receipe i made a video about that too.
If you want to see the process join my discord pls
https://discord.gg/uKyrsunu
>>2923676
Honestly anon, I remembered the face, which I don't really count as massive progress partially because you seemed to abandon it claiming you wanted the arm to self assemble the robot or something like that, and because (no offense) it's far too removed from anything acceptable to your own stated goals.
That being said, I haven't seen the hand before and that is some genuine progress, good job on that part.
I may be a bit harsh at times because it feels like you are talking a lot and getting little done, but I do sincerely want you to succeed, whatever form success will take in the end.
Here's to further progress and you realizing your dream eventually.
robotwaifutechnician
6/12/2025, 3:46:09 PM
No.2923685
[Report]
>>2923687
>>2923681
thank you its been tough going back and forth with my mom. She think she owns me cause she gave me $2000 a month(shes a millionare)
anyways she cut me off good riddance. my in laws have a house for my wife on the country side(surin thailand) and a little plot of land. maybe some day ill build a nice little warehouse there so i can mass produce the thing.
Anonymous
6/12/2025, 3:58:23 PM
No.2923687
[Report]
>>2923689
>>2923685
For now, focus on the here and now. Once you have a viable prototype you can think about all the stuff that follows later.
Do keep up updated, it's become fun to check in every month or two.
robotwaifutechnician
6/12/2025, 4:01:13 PM
No.2923689
[Report]
>>2923687
thank you im doing the spherical actuator and skin at the same time. i dont know if that receipe is going to be good .Im also going to have to get a sex doll and cut it at some point cause im not planning on molding an enture body idk.
Anonymous
6/12/2025, 4:11:46 PM
No.2923692
[Report]
>>2912365 (OP)
All that is missing is the flux capacitor.
Artbyrobot
!!Cd/+jXhVZy7
6/12/2025, 6:36:51 PM
No.2923724
[Report]
>>2923727
>>2923681
Robotwaifutechnician is NOT me, Artbyrobot. He's building a sexbot and I'm against building sexbots. His will not build the rest of its own body, mine will. You are confusing his project with mine I think.
Artbyrobot
!!Cd/+jXhVZy7
6/12/2025, 6:39:47 PM
No.2923725
[Report]
>>2923445
not a bad idea but I prefer to just post updates after I feel I have accomplished something or figured something out. I have not been working on it at all for some time unfortunately. Swamped with other unrelated work lately. But hope to get back on it ASAP.
Anonymous
6/12/2025, 6:43:38 PM
No.2923727
[Report]
>>2923731
>>2923724
>You are confusing his project with mine I think.
I was, thanks for the correction anon. Either way I'm wishing the both of you the best.
Artbyrobot
!!Cd/+jXhVZy7
6/12/2025, 6:44:32 PM
No.2923728
[Report]
>>2923505
I don't expect to be the fastest. Only the most realistic and capable in the end result UNLESS someone else prioritizes both realism AND capability as non-negotiables like I have. And to date, none have to my knowledge. And I am speaking in terms of human passing robots, NOT mech robots. Those are two entirely different types of robots IMO. Few are doing the former.
Artbyrobot
!!Cd/+jXhVZy7
6/12/2025, 6:45:33 PM
No.2923729
[Report]
>>2923505
but yeah thanks for that project link I will check that out. I'm always on the look for cool robotics projects to follow.
Artbyrobot
!!Cd/+jXhVZy7
6/12/2025, 6:48:02 PM
No.2923731
[Report]
>>2923727
thanks I appreciate the well wishes. I hope you are pleasantly surprised in the future.
What do you thnik about embodied cognition as necessary for an AGI, anon OP?
Anonymous
6/13/2025, 1:26:16 AM
No.2923812
[Report]
>>2923810
Not OP and I'll freely admit I haven't read up on the arguments made for this thesis, but intuitively it feels like someone who defined the apex of intelligence to be human intelligence, which feels like a person stuck in an old paradigm incapable of seeing the world on another.
Artbyrobot
!!Cd/+jXhVZy7
6/13/2025, 4:50:16 AM
No.2923846
[Report]
>>2923810
I heard about that theory and think its maybe helpful in some ways. But I think AGI, depending on your definition of it, is doable with or without emobodiment. I don't believe in singularity level AGI if that's what you are talking about. Again, these definitions change so much nobody knows what anybody means.
Artbyrobot
!!Cd/+jXhVZy7
6/13/2025, 8:03:59 PM
No.2923933
[Report]
>>2924699
>>2938956
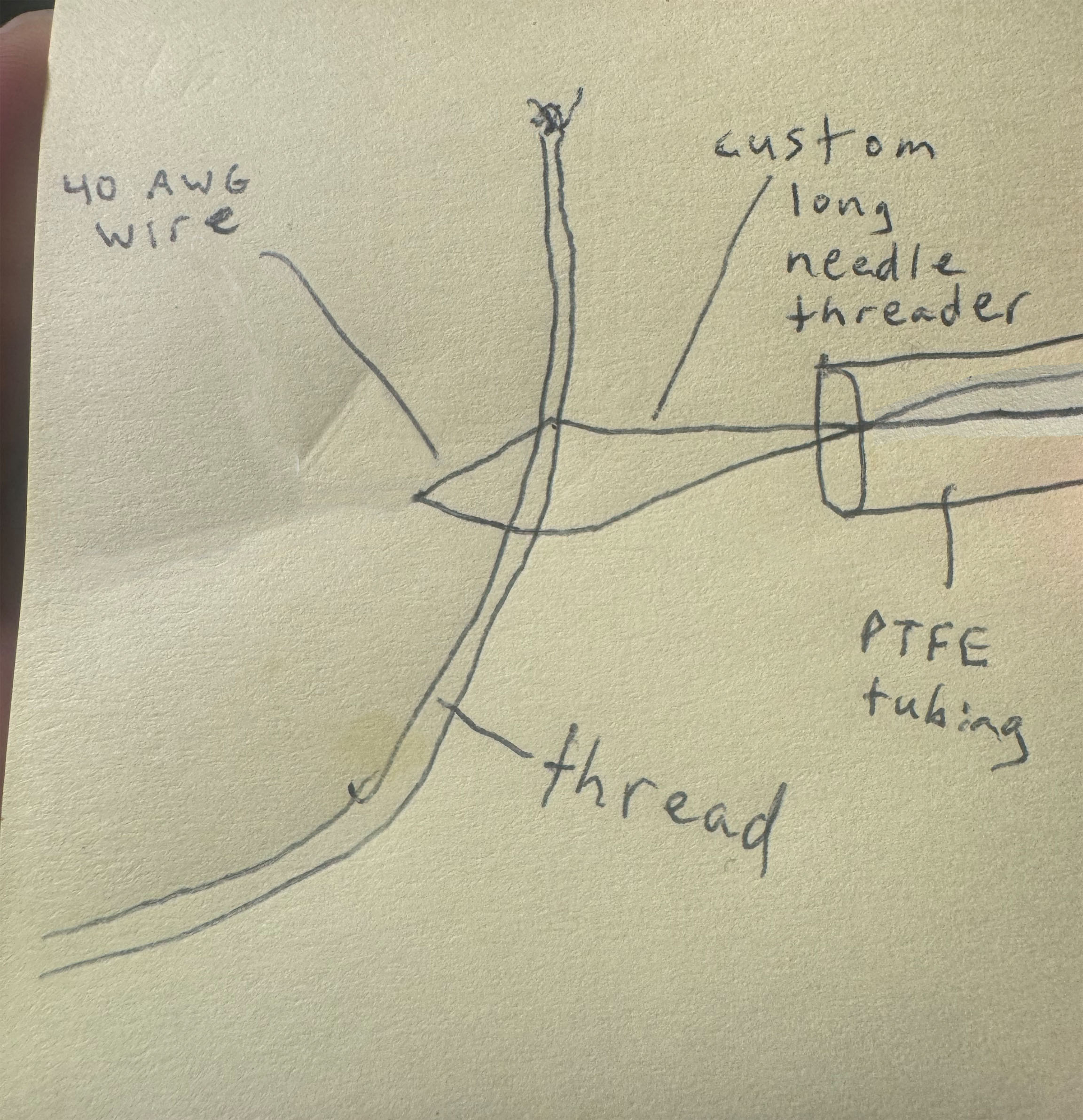
Sometimes to get the braided PE fishing line threaded through the fine PTFE tubing can be tricky, so I came up with a neat device to assist in this. I will be making a threading tool based on a needle threader tool I've been using. It's basically a wire folded in half that you shove through a needle eye and then stick your string into its end and then pull it back through the needle eye. In my use case, I'm creating a custom one of these threading tools that will feed through my entire length of tubing till its folded end comes out the other side and I can thread my string through that end and then draw it back, bringing the string through the tubing with it. I just ordered some 40ga copper and stainless steel wire to use to make this device in question. I'll see which metal is best. Gonna try the copper first I think.
>>2923933
Today on /diy/, OP folds a piece of wire in half.
>>2924699
TONIGHT ON /DIY/
>>2924708
https://www.youtube.com/watch?v=bwX-KS1816c
TONIGHT, ON /DIY/...
OP FOLDS A PIECE OF WIRE IN HALF!
RWT MIXES JISM WITH HIS SILICONE...
AND THE VTUBER GUY GLUES A FLESHLIGHT TO A MONKEY SKULL!
one day we will stop getting updates and it will be sad
OP, you need some form of deadman switch that gives us one final update in case of your demise
archiving all your important progress and advancements for others to study is paramount
Anonymous
6/18/2025, 1:45:52 PM
No.2924901
[Report]
>>2912365 (OP)
>"my"
>"advanced"
>"humanoid"
>"robot"
>"project"
>>2924896
> onboard pc running Windows
ngmi
strangely, OP does not have the "classic" schizo eyes, he could pass for a sane person
godspeed OP, remember to take your pills when the voices get too strong
Artbyrobot
!!Cd/+jXhVZy7
6/18/2025, 6:04:45 PM
No.2924953
[Report]
>>2924699
I know it was a very minor update but I'm just fighting to keep updates coming and move the needle even if I can only afford small movement with my workload on other stuff swamping me right now. I intend to get faster ASAP.
>>2924851 thanks I agree. Good ideas too. But hopefully that won't happen. If I did die, since i update right away anything I discover, you will not miss anything I came up with since it was published already. I don't hold back anything from publishing.
>>2924932 Thanks for the godspeed wishes.
Anonymous
6/18/2025, 9:48:06 PM
No.2924995
[Report]
>>2924896
It's actually Gary Downing
Anonymous
6/19/2025, 11:10:39 AM
No.2925135
[Report]
>>2924708
>>2924760
I'm fucking dying
Anonymous
6/19/2025, 3:39:56 PM
No.2925179
[Report]
>>2924932
He's not schizophrenic.
He has all of the textbook traits of narcissism.
That's why he thinks he can do any of this stuff despite having no evidence to back it up: because it's his idea and he thinks he succeeds at everything he attempts just by nature of it being him doing it.
https://clonerobotics.com/android
what is OP doing that this multibillion dollar company with investors can't?
Artbyrobot
!!Cd/+jXhVZy7
6/20/2025, 1:52:28 AM
No.2925296
[Report]
>>2925254
I'm not doing anything they can't do. And BTW clone was just ONE guy for years then a few friends and just gradually expanded. Clone likes bio-inspired design which I like as well for many reasons. The only gripe I have with them and what makes my project 10x better IMO is that they think having the robot be as loud as a bulldozer for indoor use is perfectly acceptable. I think it should be as loud as a computer fan. That will make my robot superior IMO unless they solve their noise issues.
Anonymous
6/20/2025, 6:38:59 AM
No.2925336
[Report]
>>2925361
>>2925254
That company makes incredibly dubious claims. OP makes incredibly dubious claims. I'd say honestly, in this case, OP and the billion dollar company are equally matched.
Anonymous
6/20/2025, 1:03:16 PM
No.2925361
[Report]
>>2925336
Clone has the clear edge in DAT ASS technology.
Artbyrobot
!!Cd/+jXhVZy7
6/23/2025, 6:10:48 PM
No.2926154
[Report]
>>2926190
I'm struggling to find time for this atm but hopefully will be able to ASAP.
Anonymous
6/23/2025, 9:30:29 PM
No.2926190
[Report]
>>2926326
>>2926154
Can't wait to hear about whether you folded that piece of wire in half or not. Keep us posted.
Artbyrobot
!!Cd/+jXhVZy7
6/24/2025, 10:58:18 AM
No.2926326
[Report]
>>2926511
>>2926190
I didn't need to I used a finer string and threaded it without the help of the proposed tool.
Anonymous
6/25/2025, 1:54:13 AM
No.2926511
[Report]
>>2951185
>>2926326
Incredible work. Great job buddy.
Anonymous
6/26/2025, 10:50:44 PM
No.2926941
[Report]
>>2927098
What happened to the discord?
Artbyrobot
!!Cd/+jXhVZy7
6/27/2025, 6:55:06 PM
No.2927098
[Report]
>>2926941
my discord is open but I assume you mean robotwaifutechnician's discord (peteblank's discord). It is still running but he banned or kicked some people sounds like you were one of them.
Anonymous
6/29/2025, 2:12:51 AM
No.2927432
[Report]
>>2927469
Why are people here instead of alogs?
Artbyrobot
!!Cd/+jXhVZy7
6/29/2025, 5:03:13 AM
No.2927469
[Report]
>>2927505
>>2927432
to get more people to discuss than just one website would offer.
Anonymous
6/29/2025, 8:43:32 AM
No.2927505
[Report]
>>2927625
>>2927469
What's there to discuss? All you've done is fold a wire in half.
Do you have *anything* to show us at all? People usually post about their projects once they have something to show.
Anonymous
6/29/2025, 9:27:10 AM
No.2927506
[Report]
>>2927626
>>2912365 (OP)
>human body inspired musculoskeletal systems
Please Dont, robots dont need to have our muscle-skeletal systems that's just autismo, use the arthropod/puppet way
Artbyrobot
!!Cd/+jXhVZy7
6/29/2025, 7:14:26 PM
No.2927625
[Report]
>>2927505
this is thread #5 so if you are just joining, and did not see any prior threads, you might be assuming the progress made in this thread is all of the progress which is false. I have done a ton. Click the link in op post to see all my other progress I made
Artbyrobot
!!Cd/+jXhVZy7
6/29/2025, 7:19:15 PM
No.2927626
[Report]
>>2927506
not sure what you mean but I'm still using bldc motors and tendon based actuation with pulley based downgearing. I'm not using artificial muscles in the sense of nitinol or something like that which is nonviable. I am going for human passing so it has to look flawlessly like a human in how it moves and appears to a casual observer at least from some distance.
Artbyrobot
!!Cd/+jXhVZy7
7/2/2025, 6:05:50 PM
No.2928424
[Report]
I've been working on a robotic lawnmower recently which will share the code and alot of tech I'm using for the electronics of this.
Anonymous
7/4/2025, 10:12:36 AM
No.2928902
[Report]
>>2928940
Artbyrobot
!!Cd/+jXhVZy7
7/4/2025, 4:06:44 PM
No.2928940
[Report]
>>2929248
>>2928902
he said he's abandoning his project due to lack of financial support from patrons
Anonymous
7/4/2025, 5:01:33 PM
No.2928943
[Report]
>>2929356
>>2912365 (OP)
i'm thinking of putting chat gpt in a ventriloquist dummy, maybe we could collaborate?
Anonymous
7/6/2025, 1:21:07 AM
No.2929248
[Report]
>>2928940
For which we thank god and make praise to him.
Artbyrobot
!!Cd/+jXhVZy7
7/6/2025, 6:32:11 PM
No.2929356
[Report]
>>2929484
>>2928943
I have to admit I assumed you were joking but just in case you weren't joking, if you have questions about something let me know
Anonymous
7/7/2025, 7:09:30 AM
No.2929484
[Report]
>>2929593
>>2929356
Why choose an atmega over something modern
Artbyrobot
!!Cd/+jXhVZy7
7/7/2025, 7:00:27 PM
No.2929593
[Report]
>>2930295
>>2929484
its well documented and supported on hardware and software side and used by not only most beginners but most people teaching the beginners and it is infinitely made so no risk of it ever going out of style or discontinuing. I also have already made circuits for installing bootloader onto it and programming it and circuits for custom bare bones versions of it made from scratch. I'm deeply invested. And it isn't supposed to be a powerhouse of speed or anything its supposed to be just a middle man taking orders for modern computers and just turning on and off switches as ordered and reading in signals, not doing heavy math or logic. Those things are the job of main brains pcs, not the final low level microcontroller taking the orders. Think of it as the pawn, not the quieen or rook.
Anonymous
7/10/2025, 3:23:09 PM
No.2930295
[Report]
>>2930448
>>2929593
So basically you got scared about learning STM. Got it.
Artbyrobot
!!Cd/+jXhVZy7
7/11/2025, 3:08:49 AM
No.2930448
[Report]
>>2930514
>>2930295
>STM
well as a total beginner in electronics entering this project I never heard of STM and just now even had to look it up to see its short for STM32 M0-M7 or w/e microcontrollers. I guess this is like arduino but stronger and more complex. Not sure if it is needed if I have a main brains onboard gaming pc doing the heavy lifting and the arduinos are just very low level pawns taking orders and mindlessly turning motors or reading in sensor data and reporting back. I don't think I have any lack of speed there. So I don't think any added complexity is necessary at this time. But ESP32 or STM32 or w/e is there if I need it I guess if things with arduino are disappointing in testing later on.
Anonymous
7/11/2025, 9:49:32 AM
No.2930514
[Report]
>>2930623
>>2930448
>as a total beginner
I thought you were elite?
Artbyrobot
!!Cd/+jXhVZy7
7/11/2025, 7:24:59 PM
No.2930623
[Report]
>>2930628
>>2931166
>>2930514
I said as a beginner entering the project, I did not say as a beginner 10 years into the project (now). That said, I still consider myself a novice at best in electronics but probably not a beginner at this point. I've installed relays on vehicles for custom wiring setups, I've made or fixed alot of custom adapters and cords for power tools and charging setups, I've done microcontroller work and wiring, I've started custom power supply prototypes and fixed and built lots of computers and laptops, I've built bootloader circuits and programming circuits for chips, The list goes on and one so no, most likely not a beginner.
>>2930623
>I've started custom power supply prototypes
If you're talking about the one you posted on EEVBlog it's not a functional design and you're quickly going to run into insurmountable problems with your robot's electronics unless you complete smaller educational projects first.
Anonymous
7/12/2025, 8:41:31 AM
No.2930771
[Report]
>>2930988
>>2930628
Don't you get it, anon? Working on smaller, realistic and educational projects would only be eating into time that he could otherwise spend on his magnum opus. Only retards or people without ambition lift a finger to work on anything less than groundbreaking.
>>2930628
it's a functional design from my assessment of it and even if it wasn't a functional design, which would surprise me, it would be a matter of some very minor tweaks to address any issues with it. On EEVBlog I discussed one of the alleged major shortcomings with one guy who took issue with the design and that related to the crowbard circuit and blah blah and in the end, another member there said I was the one who was correct and the other guy was wrong. So my design got vindicated. NOBODY came up with any other critique beside that critique which was proven false. If you want to bring some critique of a fault in the design I'm all ears. I have not heard one issue with it that held up to scrutiny yet.
>insurmountable problems
impossible. Every problem has a solution and chatgpt usually solves it all or a bit of reasoning of my own can solve it too in some cases or some research on it. Usually not a big deal.
>you have to do small educational projects for 30 years wasting your time and never start your dream project
I disagree. I prefer to just do the dream project, break it down into bite size pieces, and treat each of those pieces AS A SMALLER EDUCATIONAL PROJECT IN ITSELF. This is far more efficient and practical in every way and avoids spinning your wheels on endless baby projects just wasting time. PLUS as the big project goes forward over the years, little side projects to fix or build this or that COME UP and are NOT waste of time small educational projects but actual utilitarian projects that are not mere waste of time toys but actual useful stuff. I'm NOT a fan of toy making for no reason but to learn. I'm a fan of people using their time to make things of real practical value taht solve problems and not waste time making JUNK that ends up in the trash where it belongs. I make things I can USE to my benefit or other's benefit, NOT JUST WASTE TIME on making robot spiders that end up in the trash where they belong.
>>2930771
THIS
Anonymous
7/13/2025, 6:49:49 AM
No.2930994
[Report]
>>2931131
>>2930988
>it's a functional design from my assessment of it
Then why haven't you built it and made fools of everyone on EEVblog and every anon here?
Anonymous
7/13/2025, 6:53:19 AM
No.2930995
[Report]
>>2930988
>This is far more efficient and practical in every way
Only if you're capable of learning in the first place
Artbyrobot
!!Cd/+jXhVZy7
7/13/2025, 9:06:13 PM
No.2931131
[Report]
>>2931138
>>2930994
i am busy with other things so haven't gotten around to that yet. I will finish doing that as soon as I find the time though.
Anonymous
7/13/2025, 9:56:48 PM
No.2931138
[Report]
>>2931340
>>2931131
It's ~70 components, I don't believe in the last year you haven't found the maybe 4 hours it would take to build the thing from scratch. You're avoiding building it since you know it wouldn't work and making that public would shatter your facade
Anonymous
7/14/2025, 12:15:12 AM
No.2931166
[Report]
>>2931349
>>2930623
Are you a novice in electronics or are you elite?
Anonymous
7/14/2025, 12:16:15 AM
No.2931167
[Report]
>>2931341
>>2930988
>THIS
Fucking lmao at you not picking up you're getting dunked on.
Artbyrobot
!!Cd/+jXhVZy7
7/14/2025, 7:15:53 PM
No.2931340
[Report]
>>2931357
>>2932142
>>2931138
If you have 5k things on your to do list, you can't point to each one and say in the last year you could have found 5 hours for that. This logic only works if you have a 5 item to do list and that's not my situation. What makes you think my to do list is so short?
Artbyrobot
!!Cd/+jXhVZy7
7/14/2025, 7:16:54 PM
No.2931341
[Report]
>>2931349
>>2931167
Noted it, didn't care, still agreed with it, so what?
Anonymous
7/14/2025, 7:35:59 PM
No.2931344
[Report]
>>2931341
Answer the question please sir:
>>2931166
>>2931340
All those words and you couldn't construct a believable lie. Sad!
robotwaifutechnician
7/14/2025, 9:11:31 PM
No.2931376
[Report]
>>2931460
well we cant get into your head you know this is coming together though.
Anonymous
7/15/2025, 12:29:29 AM
No.2931460
[Report]
>>2931518
>>2931529
>>2931357
I don't know if you know but he's told us on his YouTube channel that he doesn't even have a job and he lives with his parents so no major bills to take care of either.
His other todo list items are repairing a torched bus (badly) and managing a kind of limp looking garden.
Boy ought to get back into art. That's the one thing I've seen from him that he's actually kinda good at.
>>2931376
Speak English.
Artbyrobot
!!Cd/+jXhVZy7
7/15/2025, 5:03:21 AM
No.2931513
[Report]
>>2932142
>>2951189
>>2951262
>>2931349
In electronics I'm novice level. I already stated this in this thread very recently so read more carefully please. In robotics I am elite level but not by resume or experience, only by goals set and confidence to achieve said goals. If anybody has goals as ambitious as mine, they are automatically elite roboticists IF they also make major reasonably consistent and sustained progress over a long period of time to go after that goal with real hurdles being crossed already. That puts you at elite roboticist level. Even if you never finished one robot. It makes you more elite than someone who has built 50 mediocre pathetic robots that are not impressive or on the same level. That makes you a boring meh roboticist amateur hour.
Artbyrobot
!!Cd/+jXhVZy7
7/15/2025, 5:07:01 AM
No.2931515
[Report]
>>2931357
If I lied, it was underemphasizing how long my to do list is saying only 5k items. It's more like 5 million items. So anybody can point to 1 of the 5 million items and say why did you not finish that 1 item last year? But they are zooming in on one thing and missing the big picture. I have to move forward strategically on a priority basis and finishing my power supply is not the priority right now. Not yet. That power supply was originally intended for my dust buster and would double as my robot power supply prototype practice run. Then my mom bought me a new dust buster and that project got shelved indefinitely. That's why you don't see me finishing it. I won't need to finish it until I'm literally on the phase of the robot build where a power supply is needed or when I build it out for my DIY robot lawnmower - a recent project I began of late in the past couple weeks.
Artbyrobot
!!Cd/+jXhVZy7
7/15/2025, 5:10:04 AM
No.2931518
[Report]
>>2931663
>>2931681
>>2931460
I am self employed running multiple ecommerce initiatives part time and recently I purchased a property in the ghetto to renovate and that has really sucked up a ton of my time and is a mega project I'm doing one man army style presently on a shoestring budget. More videos on that to come.
robotwaifutechnician
7/15/2025, 6:30:15 AM
No.2931529
[Report]
>>2931460
and what language did i write in buddy?
Anonymous
7/15/2025, 10:20:37 PM
No.2931663
[Report]
>>2931744
>>2931518
>I am self employed running multiple ecommerce initiatives part time
Is it dropshipping?
It sounds like you're just doing dropshipping.
Anonymous
7/15/2025, 11:53:39 PM
No.2931681
[Report]
>>2931518
Yeah fucking right haha.
>>2931349
actually upon further reflection, I would say I'm a intermediate at electronics. Upper intermediate even among hobbyists possibly borderline advanced among hobbyists. Among full time professionals in electrical engineering I'd be considered solid intermediate IMO.
>>2931663 no, its products I invented/designed and make myself and then sell online.
Anonymous
7/16/2025, 4:07:30 AM
No.2931752
[Report]
>>2931778
>>2931744
And yet you dodge every question about building a beginner level project like a power supply since you know none of that is the truth
Anonymous
7/16/2025, 6:22:13 AM
No.2931776
[Report]
>>2931778
just checking in quick to see if the retarded fresk is still at it
day 3600 of nothing of value produced lmao
>>2931752
Not a single beginner has EVER built a switch mode power supply from scratch. You are crazy to suggest that is a beginner level project. Getting a LED to flash with arduino is beginner, NOT building a power supply of one's own design. Beginners don't ever do that nor do intermediate usually that's advanced level only.
>>2931776
just been too busy with my other stuff to work on it much sadly.
Anonymous
7/16/2025, 6:50:07 AM
No.2931779
[Report]
>>2931791
>>2931778
Wrong and you know it, they're conceptually and practically simple and are often beginner projects for that very reason. You have a big chip on your shoulder because you failed to design one and gloated about it before the reality set in and now you can't hide your failure.
Anonymous
7/16/2025, 6:59:59 AM
No.2931782
[Report]
>>2931791
>>2931778
not busy enough to stop posting and start building
Artbyrobot
!!Cd/+jXhVZy7
7/16/2025, 8:00:05 AM
No.2931791
[Report]
>>2931794
>>2933211
>>2931779
when did I gloat about it? Why do you say I failed to design one when I literally designed it and posted it and nobody has been able to point out a single flaw in it? It's a massive success so why say hide my failure? Also since you claim designing and building a switch mode power supply is a beginner level project for electronics beginners, show me a beginner who has published a video series or blog showing their switch mode power supply they designed and built from scratch as a BEGINNER in electronics.
>>2931782
literally nobody on earth is too busy to write a sentence or two between working on projects. What an absurd comment from you.
Anonymous
7/16/2025, 8:08:42 AM
No.2931794
[Report]
>>2931942
>>2931791
blog on faggot lmao
Anonymous
7/16/2025, 10:04:13 PM
No.2931942
[Report]
>>2931794
Bro don't you understand? This live-with-his-parents NEET loser is BUSY! Produced from how busy he's been: NIL.
Anonymous
7/16/2025, 10:06:36 PM
No.2931943
[Report]
>>2931949
>>2931744
>actually upon further reflection, I would say I'm a intermediate at electronics. Upper intermediate even among hobbyists possibly borderline advanced among hobbyists. Among full time professionals in electrical engineering I'd be considered solid intermediate IMO.
This is hilarious because I can tell your narcissism made you dwell on the fact you had to admit you were a novice, so you stewed on it for a day and cooked up some cope about how your actually advanced because there's no way you could be bad at anything.
Tell us Larry, is there anything you're not good at?
Anonymous
7/16/2025, 10:21:46 PM
No.2931949
[Report]
>>2931943
He's not good at telling the truth
Exhibit 1: His name isn't Larry and he's dropped the gardogg persona after its reputation became too tarnished by his behavior on the WOW forums
Anonymous
7/17/2025, 5:46:42 PM
No.2932142
[Report]
>>2932358
Someone should do a statistic on how much of his threads are "productive" posts, acctual progress, and him haveing to defend himselfe.
>>2931778
A beginner can build anything but the quality will be shit and he takes longer. I could draw the monalisa if i had a year to spare and it would still look like shit
>>2931744
>(IMO)
Kek
>>2931513
>Elite in robotics
No it just makes me a retard with a distorted view of reality. My CVD diamond growth chamber will probably never yield any resulta but im autistic af and like to read research shit
>>2931340
You could have a todo list on your blog so we can see how many tasks you get done. You could also post an acctual timeline with a history. You can then just point towards it if somone accuses you of not haveing any progress to show.(Unless you: 1 dont have any progress. Or 2 cant take 2 hours to organize your progress)
All jokes aside i think your project is a cool piece of human spirit and once you acctualy grow out of your narcicistic phase and start listening to the advice we give you this could be fun to watch.
Tldr: stop being a retard and start listening. 0%chance you are smarter than everyone here.
Untill then i will be here for the hate
Anonymous
7/18/2025, 4:24:12 PM
No.2932358
[Report]
>>2932142
>once you acctualy grow out of your narcicistic phase and start listening to the advice we give you this could be fun to watch.
Do you know how long he's been "working" on this? He's 10 years into this. He's never growing out of his narcissistic "phase" because it isn't a phase. He's mentally ill.
Artbyrobot
!!Cd/+jXhVZy7
7/20/2025, 12:44:18 AM
No.2932693
[Report]
>>2938956
Minor update: I have now carefully mounted the PTFE tubing that leads to the elastic string tensioner for the winch in place pulley. I mounted it snugly to the side of the PTFE tubing coming off the same winch in place pulley that leads to the Archimedes pulley system. I routed both of these using my CAD for reference in such a way that their routing will not interfere with the next motors that will be installed later. I mounted this PTFE tubing that leads to the elastic string tensioner using ONLY 401 glue which is something I've never tried before now. Usually I first wrap the tubing in adhesive transfer tape and spandex cloth wrap and coat the cloth in 401 glue but skipping that made it able to be more snugly mounted to the other tube by way of only glue. We'll see how that holds up without the other reinforcement the cloth provides etc. Seems to look so far so good though. They are in turn glued to paper soaked with 401 glue and to a little piece of stainless steel wire bent at a 90 and that wire in turn glued to the winch in place pulley mount baseplate which is itself made of paper and 401 glue. So basically everything is becoming 401 glue construction! I have some concerns about how this will hold up in the event of a fall or w/e but perhaps we can create some sort of protective cage around any delicate outcroppings like this in the future. For now I am just going for ease of construction and speed of construction to get things back on track and rolling again.
Note: The PTFE tubing that leads to the elastic string tensioner for the winch in place pulley is 0.66mm ID 1.16mm OD PTFE teflon tubing. The string coming off the winch in place pulley feeding into this tubing that will act as tensioner string tension carrier string is 6lb test 0.08mm PE braided fishing line. I was able to thread this fishing line into this TPFE tubing by hand with no issues at all very easily.
Artbyrobot
!!Cd/+jXhVZy7
7/20/2025, 12:45:30 AM
No.2932694
[Report]
The next task will be to mount the end of this string to the 2 feet of elastic string for jewelry making and thread that into 1.8mm ID 2.2mm OD PTFE tubing and tie it off at the end of that tubing and then mount that tubing to the gray string hanging from my ceiling for now. That will conclude the tensioner mechanism for the winch in place pulley and this will usher in the next round of manual hand testing to see how much tension that is giving us. I also will be moving the tension spring mounted on the motor to align it better and shorten it more since it only moves like 4mm and so can be way shorter than it is now.
Artbyrobot
!!Cd/+jXhVZy7
7/21/2025, 11:07:35 PM
No.2933164
[Report]
>>2938956
I finally finished making the tensioner mechanism for the winch in place pulley and I taped it off up the string descending from the ceiling and taped the far end of it onto the ceiling. I noticed I have to keep it as straight as possible since when curling with too much turning the elastic bracelet cord grips the sides of the PTFE tubing which could interfere with the amount of tension it brings to my winch in place pulley. So this will mean on the robot itself it will have to go from the shoulder all the way down the torso in a straight line and then down the leg to about the knee as well. It's 44" long in total. I ended up bumping up the elastic bracelet cord to 30" long to reduce the amount of tension it puts on the winch in place pulley more. The longer it is the less tension it brings and the shorter it is the more tension it brings. If it really can't fit into the leg I can cut the elastic bracelet cord in half and place braided PE fishing line in between the two halves and have that make a 180 degree turn around a pulley and thereby have the same length of elastic bracelet cord but separated into two halves mounted parallel to eachother that create a in series matching tension but taking up half the overall length. This way I could keep it out of the leg area if needed. However I think it might fit into the leg area fine perhaps. Not sure (once we get all the other motors and their tension strings that amount of 2.2mm OD PTFE tubing will start to add up.
Artbyrobot
!!Cd/+jXhVZy7
7/21/2025, 11:08:42 PM
No.2933165
[Report]
Note: I'm also considering taking the elastic bracelet cord out of the tubing and lubing it then putting it back in since lube on the grippy elastic bracelet cord would take away it gripping the sides of the PTFE tubing some I think. Silicone lube is best for this according to chat gpt.
Note: to secure the far end of the elastic bracelet cord I used 401 glue to glue on PE fishing line onto its end the same way as we discussed before and then took the far end of this PE fishing line and came out the end of the PTFE tube with it and taped it off onto the outside of the tube. We'll see how that holds up it might need to be glued down if it gradually is pulled through the tape over time which would be no good.
Anonymous
7/22/2025, 3:22:57 AM
No.2933211
[Report]
Anonymous
7/22/2025, 4:32:21 AM
No.2933225
[Report]
>>2933271
Are you having sex with that thing? There was an anon that was also autistic and had a basement full of sex dolls, maybe you guys could meet and be friends.
Artbyrobot
!!Cd/+jXhVZy7
7/22/2025, 12:09:05 PM
No.2933271
[Report]
>>2933225
I'm opposed to use of sex dolls and sex robots for sexual purposes. I consider it lustful and the Bible says to flee youthful lust.
Artbyrobot
!!Cd/+jXhVZy7
7/28/2025, 6:00:34 AM
No.2934777
[Report]
I've been trying to come up with a way to adjust tension on the finger extension spring in case it loosens over time.
Anonymous
7/29/2025, 3:38:21 AM
No.2934950
[Report]
Good fucking god
https://www.youtube.com/watch?v=m4bzQV3ntRE
See a brain doctor immediately
Anonymous
7/29/2025, 6:05:22 PM
No.2935064
[Report]
>>2935221
>>2912365 (OP)
ill start taking you seriously if you show a moving hand. until then you're either a RPer or a schizo.
Anonymous
7/29/2025, 6:06:42 PM
No.2935065
[Report]
Artbyrobot
!!Cd/+jXhVZy7
7/30/2025, 9:08:22 AM
No.2935221
[Report]
>>2935064
challenge accepted. And that's fair I guess.
Artbyrobot
!!Cd/+jXhVZy7
8/1/2025, 3:03:17 PM
No.2935607
[Report]
The tension spring mounted to the motor setup upon further testing seems like a somewhat bad method. The issue I'm having is too much play in the tubing running between that spring and the finger joint. When tension is applied to that spring by way of the tubing, the tubing recoils and moves quite alot and allows alot of slack out to the joint so that the spring has very little involvement in the joint and doesn't really get used much period. So the full range of motion of the joint is just absorbed by tubing slack. When I tried to pretension the tubing so that the joint movement translates to the spring, the total tension placed on the joint by this became too high.
Fortunately, I came up with a much more elegant and simple solution for all of this. Basically, my plan now is to just use the bracelet cord tied point to point across the joint directly on the joint and that will be my spring for extension that counters the motor. This eliminates the need for metal springs at all which cuts costs, it also eliminates the PTFE tubing run, saving some space, and should be easier to install and easier to give precise amount of elasticity/resistance to taste. If I want more springback on the joint I can just add more bracelet cord in parallel to the first. This way I can add more resistance pretty easily.
Artbyrobot
!!Cd/+jXhVZy7
8/2/2025, 12:15:21 PM
No.2935790
[Report]
>>2938059
So in recent testing a fresh issue I ran into was the TPFE tubing would start gradually pulling through its tightly wrapped tape sleeve to my surprise. Its low friction surface gradually pulls free of the tape over time. To resolve this, I decided to thread through the tip of the tubing to create a mechanical bond for the tip and once threaded through I just 401 glued down the ends of each thread onto the sleeve that was originally supposed to hold it in place to begin with. This seems to work great so far in the little bit of testing I've done since.
Artbyrobot
!!Cd/+jXhVZy7
8/2/2025, 12:16:25 PM
No.2935791
[Report]
>>2938956
Anonymous
8/7/2025, 5:42:10 PM
No.2936889
[Report]
Artbyrobot kinda fell off desu...
Anonymous
8/13/2025, 2:10:38 PM
No.2938059
[Report]
>>2935790
Why do you draw these pictures? The concepts are very simple and there are no measurements, rendering them worthless. At least use a ruler.
Anonymous
8/14/2025, 5:28:35 AM
No.2938170
[Report]
>>2938226
Gary used to be a really good artist
https://www.youtube.com/watch?v=giPcnXulDao
Did you have a stroke or head injury or something between 2006 and now? Your old art was genuinely great but your diagrams look nothing like it
Anonymous
8/14/2025, 3:54:35 PM
No.2938226
[Report]
>>2938170
This is the one thing he's actually good at, and it's the one thing he downplays his ability with.
I wonder if all of this narcissistic posturing stuff comes from his own self-doubt about the quality of his art.
Anonymous
8/18/2025, 11:35:21 AM
No.2938955
[Report]
Anonymous
8/18/2025, 11:42:56 AM
No.2938956
[Report]
>>2954144
>>2923933
>>2932693
>>2933164
>>2935791
You know, OP, I was on Twitter the other day and I saw a thread where people were talking about robotics and hand designs and I saw people talking about using cables to control fingers, hand range, etc to match our ligaments. They were saying that using multiple smaller systems with cables / wire to control the hands was likely the way to move forward. It reminded me of your work and thread.
So keep it up and keep us posted when you have the time!
Anonymous
8/20/2025, 9:19:53 AM
No.2939422
[Report]
>>2954144
I figured out a robust way to make the extension cord for finger extension using the bracelet cord and a fishing crimp sleeve. The idea is to crimp the two ends of a folded in half strip of bracelet cord and this way both ends can be sewn down into the fabric without any gluing which could potentially fail or be a weak point. I am planning to use this in place of the tension spring style finger extension setup.
Artbyrobot
!!Cd/+jXhVZy7
8/21/2025, 3:26:15 AM
No.2939598
[Report]
"The difference between confidence and arrogance is being able to back up your BS" - John Maddox.
I found this an interesting take. I wonder if some people will retroactively consider my positions in robotics to be confidence instead of arrogance if one day I succeed to some arbitrary level to their satisfaction whereas I'm presumed arrogant until proven confident until then.
Anonymous
8/21/2025, 4:32:13 PM
No.2939712
[Report]
>>2939718
Question for you, Art.
What do you consider your greatest achievement in robotics to date?
Artbyrobot
!!Cd/+jXhVZy7
8/21/2025, 4:58:20 PM
No.2939718
[Report]
>>2939949
>>2940543
>>2939712
I would say I have no achievements in robotics. I am defining an achievement in robotics as a video demo of a working robot and that requires building a robot which can do something impressive. I am far from that.
>>2939718
Technical question : you said you use bldc motors. The ones you got look very specific, not like a drone motor. I imagine the choice was dictated by max torque ? Can you talk more about it ? Sorry I'm not reading one year of schizo posting but I respect the dedication
Artbyrobot
!!Cd/+jXhVZy7
8/23/2025, 6:26:36 PM
No.2940176
[Report]
>>2939949
The volume the motor takes up is the determining factor in my selection. Max torque per volume taken with cap on total volume afforded being hard set. Also the motor had to be commodity level produced with enough sales volume to give economies of scale and make it affordable. Also had to be inrunner style for ease of use and cooling and mounting considerations in my design.
Artbyrobot
!!Cd/+jXhVZy7
8/23/2025, 7:21:30 PM
No.2940191
[Report]
>>2939949
oh also here's all the motors I bought for this that I have to choose from:
****Motors Selections - Listed Smallest to Biggest****
Micro N20 ------- Brushed DC Motor ------- 1-3.7v ------- $1 ------- uses: eyelids, maybe facial expressions?, eye movements maybe?
Brushed DC Motor size 140 ------- 5v ------- $0.86 ------- uses: eyelids, maybe facial expressions?, eye movements maybe?
Brushless DC Motor size 2430 ------- 5800kv ------- 24a ------- 7.4v ------- 200 watts ------- $15 ------- uses: finger joints, most small muscles overall - most used in robot like 150+ of them
Brushless DC Motor 1/16th 1/18 RC size 2838? ------- 12.6v -------24a ------- 300 watts ------- $27 ------- uses: maybe larger arm muscles like forearms or wrists? also back, abs, neck, etc misc muscles maybe
Brushless DC Motor size 3650 1/10 RC ------- 13v ------- 69a ------- 900 watts ------- $28 ------- uses: maybe larger arm and torso and back muscles or forearms or wrists
Brushless DC Motor size 4082 1/7 RC ------- 36-52v ------- 64a ------- 3400 watts ------- 930kv ------- $65 ------- 1.4Nm nominal 4.35Nm stall uses: beefier thigh and leg motors etc
Anonymous
8/25/2025, 3:13:29 AM
No.2940543
[Report]
>>2939718
Thanks. Screencapped.
Anonymous
8/25/2025, 5:58:58 AM
No.2940617
[Report]
>>2912365 (OP)
When will the lactating prego sex bots become readily available?
Anonymous
8/25/2025, 6:05:41 AM
No.2940619
[Report]
>>2940620
>>2925254
eey I remember that polish guy from years ago, glad he could grow his idea to the point of starting a company.
robotwaifutechnician
8/25/2025, 6:11:53 AM
No.2940620
[Report]
>>2940619
Im not impressed by clone robotics. Pneumatic muscles are nothing new. Soft actuators are. Good luck making that robot walk with pneumatic muscles btw.
>multi billion dollar company
Yeah well you know how it is. Some people have access to venture capital for making a neat freak show robot.
Anonymous
8/26/2025, 4:02:39 AM
No.2940846
[Report]
>>2940855
>>2912365 (OP)
>my goal with the AI is to code just enough AI that the AI can begin coding itself
robotwaifutechnician
8/26/2025, 4:48:40 AM
No.2940855
[Report]
>>2940861
>>2940861
>>2940846
Well there is some merit to the idea that llms don't fit into a robot that well. The biggest use of ai in a robot is image classification i think but that could be achieved without ai it'd just be more tedious way drawing lines on a video feed.
Ive had this wild idea of a blank slate robot that uses its senses as a database but lets not get carried away. A sex bot is an improvement over a sex doll.
robotwaifutechnician
8/26/2025, 5:03:02 AM
No.2940861
[Report]
>>2941749
>>2940855
>>2940855
So following that logic though you could draw lines to classify rectangles and circular shapes atleast. Cant say what artbyrobot has been working on regarding ai though.
But that approach has way less requirements than an llm that might need a gpu.
Artbyrobot
!!Cd/+jXhVZy7
8/27/2025, 11:47:36 PM
No.2941271
[Report]
>>2941319
>>2942964
Ok I figured out a bit easier way: tie a knot at each end of the strip of bracelet cord and then tie my nylon thread off onto the bracelet cord inside that bracelet cord knot. The bracelet cord knot on each end acts as an endstop. Seems to work great so far and cuts down on materials this way over the previous way I proposed.
Anonymous
8/28/2025, 4:00:58 AM
No.2941319
[Report]
>>2941271
Moving on from folding bits of wire to tying knots with string. Great work OP. You're really getting somewhere now.
Maybe you could integrate a crayon into your project somehow. That might be fun.
Anonymous
8/30/2025, 3:00:17 AM
No.2941749
[Report]
>>2940861
models that can identify shapes already exist (for example Yolo 11) and doing it for scratch is most likely a waste of time and resources
Artbyrobot
!!Cd/+jXhVZy7
9/3/2025, 10:43:10 PM
No.2942748
[Report]
>>2942964
Okay so the bracelet cord self untied quickly so I'm going back to my previous approach of tying off both ends of the bracelet cord with a fishing crimp sleeve.
While trying to cut in half fishing crimp sleeves with my mini miter saw I noticed it was a difficult process and not ideal. So I came up with a easier method which was way faster, cleaner, less setup and takedown, no deburring needed, etc!
The method is to lay the fishing crimp sleeve on a flat surface and line up a exacto knife blade perpendicular to it across its top and then apply moderate downward pressure to score the metal and then slide the knife carefully back and forth creating a perfect scoring line that grows deeper with each pass. After several passes the fishing crimp sleeve halves separate cleanly! This method uses a similar principle to a copper pipe cutter used in plumbing.
Anonymous
9/4/2025, 11:30:45 PM
No.2942964
[Report]
>>2942991
>>2941271
>>2942748
If you need an endstop, could you not just melt the cord with a lighter flame and squash it into a flat shape?
Artbyrobot
!!Cd/+jXhVZy7
9/5/2025, 3:07:28 AM
No.2942991
[Report]
>>2942964
Cool idea I'll have to keep that in mind and maybe try it some time
Artbyrobot
!!Cd/+jXhVZy7
9/6/2025, 8:06:38 PM
No.2943301
[Report]
I installed two tensioners for the robot and they were seriously successful overall in testing. So much so that I am now confident enough in the entire pulley system to move onto the custom mini BLDC motor controller to get the motor to run motorized tests of finger movements next. Well after a couple very minor tweaks that is.
So the first tensioner I installed on the extension part of the index finger joint we are working on. I used the bracelet cord folded in half and fishing crimp sleeved then sewn into the bone fabric. It seems just about perfect except for one thing: I want to keep it under mild constant tension but the bone fabric creeps/moves slowly when put under constant tension like this because it is taped into place on the bone after all. The tape is allowing the movement. This means it does not stay put and my anchor points move over time so I can't set a tension and rely on it staying at that tension long term. To resolve this I need a mechanical connection at the tension point anchoring location.
Artbyrobot
!!Cd/+jXhVZy7
9/6/2025, 8:07:41 PM
No.2943302
[Report]
To mechanically connect my anchor point, I have decided to use tiny self tapping screws. I have avoided screwing into the bones till now but I'm making an exception here. The screws won't be going that deep and the finger bones are unlikely to break anyways IMO. So I feel comfortable with this. Here's the screws I ordered for this from Amazon:
Artbyrobot
!!Cd/+jXhVZy7
9/6/2025, 8:08:45 PM
No.2943303
[Report]
Next, I created a tensioner for the middlemost archimedes pulley. That pulley was creating significant drag and slowing down the finger extension during testing due to rope friction. So adding a tensioner line to pull it back down toward the fingers during extension was my solution for this. It worked amazingly well. To make this, first I tied off a fishing hook eye to the bottom of the radius bone just above where my TPFE guide tubing entrance is. Then I glued a 7cm piece of bracelet cord to a piece of 6lb test .08mm braided pe fishing line with 401 glue. I secured the top of the bracelet cord to the top of the archimedes pulley system and then threaded the other end through the fishing hook eye and back up and to the bottom of the archimedes pulley where I tied it off. So it ties off at top, comes down to bottom, goes through the fishing eye then comes back up and connects to my pulley. It creates just enough downward pull to delete the rope drag slowing down that pulley from coming down and this enables the system to unwind and extend back to its starting point after each time I contracts/pulls upward to cause finger contraction. This means the finger extension now happens swiftly with no hangups and the whole archimedes pulley system is now under constant tension at all times which keeps things neat and prevents tangling issues pre-emptively. This rig was a massive success and took up hardly ANY space at all.
I put the post it notes behind the archimedes pulley tensioner so you can see it. It's hard to see otherwise without a contrasting backdrop. It works amazingly well.
Artbyrobot
!!Cd/+jXhVZy7
9/10/2025, 7:26:10 PM
No.2944220
[Report]
>>2944446
Back on the electronics again. Have been going over my BLDC motor schematic and making some little tweaks to it. Here's the updated schematic. It's a combination of lots of other schematics I've found online as well as some chatgpt help. With 1 being no clue and 10 being absolute expert tier in BLDC motor schematics I'm probably a 5 IMO. So take my design with a grain of salt. It will be very fun to see if it works. Note that I put a couple schematics of Electronoobs - a great youtuber on the left hand side as reference and study material. My schematic is the big one on the right. Electronoobs series of videos on BLDC motor controllers has been extremely helpful in me forming a rudimentary understanding of this stuff.
Anonymous
9/12/2025, 5:27:11 AM
No.2944438
[Report]
I wish I had this level of autism
Anonymous
9/12/2025, 6:12:35 AM
No.2944446
[Report]
>>2944481
>>2944220
I suggest you to do proper diagrams on kicad, PCBWAY offers soft PCBs that might be a more professional solution than whatever you are doing
Artbyrobot
!!Cd/+jXhVZy7
9/12/2025, 2:00:13 PM
No.2944481
[Report]
>>2944484
>>2944446
Well I did do proper diagrams on kicad for a earlier version of this and submitted it to one of the big PCBA guys and the price was too high IMO. That and I'm not confident in my design enough to have it mass produced or locked in. I want to test prototypes of it and gradually improve on it iteratively many times over, proving it out before I even consider that route. Plus I want to maintain flexibility of form factor and techniques and innovate there alot. Iteratively sending out to a PCBA company would be prohibitively expensive and I already have DIY flexible circuitboard making materials purchased as well. Plus I don't want to be super dependent on 3rd party labor input I want to master deeply as much as I can. Oh yeah and I also want to master hand assembly and hand soldering SMD which will help me have the skills in those things which I can then teach my robot those skills and have it do all of that work for me in the future ideally. Which is free labor and rapid turn around.
Note: I have been reached out to by like 4 different PCBA companies who offered to do my PCBA for free but I have to shill them. I would want to be paid to be a infomercial though, not just a free service here or there. Like paid cash for a significant profit otherwise I would be underselling myself. I'd rather wait till I'm at that level where companies offer significant advertising dollars to me to promote their services.
Anonymous
9/12/2025, 2:11:45 PM
No.2944484
[Report]
>>2944481
Fair enough anon. You seem much less arrogant than last year good for you
Anonymous
9/16/2025, 1:08:45 AM
No.2945092
[Report]
>>2913545
>I just LOVE expert systems or rules based systems (same thing).
Are you autistic perchance?
Artbyrobot
!!Cd/+jXhVZy7
9/19/2025, 8:07:47 PM
No.2945756
[Report]
I started some testing on some subsections of the BLDC motor controller and ran into some problems and learned several things. I'm working with chatgpt to resolve each issue and have been updating my schematic to reflect alot of the changes I am making. One thing I learned is that for the high side switch, the voltage from gate to source has to be 10-12v higher than the drain voltage because the drain voltage becomes the same as the source voltage once the switch is on. The voltage from gate to source then either has to start out as motor input voltage + 12 while still fitting within the voltage from gate to source max allowed voltage as stated by the datasheet or it has to rise dynamically as the source voltage rises such that the voltage from gate to source is 12 more than the source voltage as the source voltage rises to become the drain voltage. Fortunately, I can have the former for this 2430 motor since I can use 6-8.4v to supply the motor and the voltage from gate to source max value is 20v. This means I can use voltage from gate to source of 20v and this, when mosfet is first switched on, does not fry mosfet but as the source rises to become 8.4v, 20v-8.4v is still 11.6v which is sufficiently high to enable the mosfet to still stay on without anything dynamic set up. If I want to go with a 12v motor supply on some of the bigger motors later on, I will need a bootstrap circuit to supply the highside mosfet with a dynamic voltage from gate to source that rises when source voltage rises. So I added that schematic diagram to this as well as an option. I also can use a mosfet driver for this but was hoping to cut that cost and added volume taken up by just using discrete components rather than a IC for this.
Artbyrobot
!!Cd/+jXhVZy7
9/19/2025, 8:10:05 PM
No.2945757
[Report]
Anyways, to break things down even more in testing, I decided to just test turning on and off a single highside mosfet using a pair of lab power supplies, one to provide 20v and one to provide 8.4v. To turn on I connected the gate and source to my 20v lab power supply and I connected my red alligator clip of my 8.4v lab power supply to the drain and then measured from source to the black lead of the 8.4v power supply and verified 8v on that test which worked - proving the mosfet was in fact on. I then removed the black alligator clip of the 20v lab power supply from source and shorted the source to the gate to drain the internal capacitor inside the mosfet and then tested from source to the black 8.4v clip and sure enough it was near 0v so was off. But it did gradually climb back up to 8.4v after the short from gate to source was removed due to capacitive coupling and leakage according to chatgpt. So I will need to add a 10k ohm resistor between gate and source pins to short it automatically and keep it fully drained and off fully when it's supposed to be off.
Artbyrobot
!!Cd/+jXhVZy7
9/19/2025, 8:11:11 PM
No.2945759
[Report]
>>2946012
>>2948224
So I plan to just gradually add components little by little and test after each thing is added to ensure it is working right still after each little change and this way gradually build out the circuit, proving each thing works as we go. This is because things have all these gotchas and "oh you didn't know this little detail?" that keeps coming up and proves it was more complicated than I thought. So I just have to prove every little thing as I go. To try to find out what is wrong after the whole thing is built would be WAY harder than to figure out what went wrong when a single component is added and it was working before said component was added. So that's how I will be able to overcome this challenge best I feel.
Anonymous
9/20/2025, 4:30:39 AM
No.2945851
[Report]
>>2945888
Did your robot build itself yet?
Anonymous
9/20/2025, 12:49:51 PM
No.2945888
[Report]
>>2945851
ChatGPT says "no".
Anonymous
9/21/2025, 2:58:58 AM
No.2946012
[Report]
>>2945759
>more complicated than I thought.
Yep. That's pretty much what everyone has been telling you about everything across the entirety of the project.
Artbyrobot
!!Cd/+jXhVZy7
9/28/2025, 5:12:01 AM
No.2947430
[Report]
>>2947798
Been studying EMI stuff. Supposedly I have to route the signal wires and power wires away from eachother to help prevent interference. Gonna be electrically noisy robot I think.
Anonymous
9/29/2025, 7:38:39 PM
No.2947798
[Report]
>>2947430
This was repeatedly explained to you a few threads ago
Anonymous
10/1/2025, 11:48:20 PM
No.2948224
[Report]
>>2948234
>>2945759
Yeah, that's why people said start small with easier stuff and work your way up to learn and experiment. Have a proven baseline with essential features that you can fall back to if needed, then think about what should be changed or is a nice-to-have.
A simpler design that has less complexity / more reliability is much easier to diagnose, fix, modify, or replace later on in the project (lower cost of change, higher design freedom). Things can and will go wrong and you should set yourself up to make it as easy as possible to fix (hint: dont use hundreds of motors)
Artbyrobot
!!Cd/+jXhVZy7
10/2/2025, 12:50:55 AM
No.2948234
[Report]
>>2948247
>>2948224
if a robot doesn't have hundreds of motors it is shit and useless. horrible advice.
Anonymous
10/2/2025, 2:07:54 AM
No.2948247
[Report]
>>2948326
>>2948234
I am sorry bro, you lack the discipline and the critical thinking to achieve this, you are a North American, you schools and universities don't teach shit, you basically bought your diploma. Your country need to buy scientists and thinkers from all over the world to be able to do anything.
https://en.wikipedia.org/wiki/Dunning%E2%80%93Kruger_effect
Artbyrobot
!!Cd/+jXhVZy7
10/2/2025, 2:59:27 PM
No.2948326
[Report]
>>2948247
>you can't learn outside of formal education
lol ridiculous.
Anonymous
10/3/2025, 1:02:33 PM
No.2948505
[Report]
>>2948652
>>2912365 (OP)
i dont think your ai idea will work, current tech just isnt there yet
honestly id be impressed if you can use AI to insert a cable into a socket, the amount of coordination is too delicate for now
even if you somehow manage to make the whole thing work, the cost will bankrupt you
Artbyrobot
!!Cd/+jXhVZy7
10/4/2025, 4:25:50 AM
No.2948652
[Report]
>>2948714
>>2948505
It's not using current tech. I'm not a script kiddie copying current tech. It is custom AI, not garbage LLMs or NNs etc
Anonymous
10/4/2025, 2:54:45 PM
No.2948714
[Report]
>>2949149
>>2948652
>Not a script kiddie
>Idea of an AI is a glorified giant IF ELSE block
Artbyrobot
!!Cd/+jXhVZy7
10/6/2025, 6:53:14 PM
No.2949149
[Report]
>>2949266
>>2948714
>thinks script kiddie is defined as certain coding styles
false. its someone that just copy pastes existing tech. has nothing to do with coding styles and everything to do with not making custom code at all.
Anonymous
10/6/2025, 10:38:22 PM
No.2949266
[Report]
>>2949418
>>2949149
Why not custom code your own NN? Surely it would be faster and easier than trying to make a robot using billions of hand programmed if-else statements.
There's a reason this current tech is currently being used in the real world, and not just some research lab looking for a problem to solve like quantum computers.
>inb4 it can't be done by one person
https://www.youtube.com/watch?v=kCc8FmEb1nY
https://www.youtube.com/watch?v=xs6dOWlpQbM
https://www.youtube.com/watch?v=VaeI9YgE1o8
Artbyrobot
!!Cd/+jXhVZy7
10/7/2025, 6:55:03 PM
No.2949418
[Report]
>>2949426
>>2949584
>>2951042
>>2949266
NN's suck that's why. If statements rule the world. And no, I don't do else I just do if.
Anonymous
10/7/2025, 7:38:02 PM
No.2949426
[Report]
>>2949418
>And no, I don't do else I just do if.
Post 1 (one) if statement from your robot's logic.
Anonymous
10/8/2025, 1:14:50 PM
No.2949584
[Report]
>>2949418
>I don't do else I just do if
That sounds like driving from point A to B by only using right turns.
Artbyrobot
!!Cd/+jXhVZy7
10/8/2025, 3:19:06 PM
No.2949598
[Report]
>>2949638
>>2949937
>>2950396
if (somePersonIsFat == true)
{
do something
}
if (somePersonIsFat == false)
{
do something else
}
Artbyrobot
!!Cd/+jXhVZy7
10/8/2025, 5:43:41 PM
No.2949638
[Report]
>>2950396
>>2949598
so I guess this is if else but more explicitly defining the if and the if not rather than just saying else. I don't like saying else and would NEVER do it.
Anonymous
10/9/2025, 11:55:56 PM
No.2949874
[Report]
wow Artbyrobot ive never seen such a cool project with as much ambition as this one
of course haters wont understand your genius, but i follow your posts on every platform you use (its a bit redondant but sooo interesting)
i want to be like you when im older
Anonymous
10/10/2025, 4:30:12 AM
No.2949937
[Report]
>>2949598
you post eight absurdly simple lines and even that is garbage
this is satire, right?
Anonymous
10/12/2025, 7:33:40 PM
No.2950396
[Report]
>>2950472
>>2949598
>>2949638
That is not equivalent to an else statement if you ever change the value of the conditional variable inside the code block, or in the less common case where checking a value modifies it during the condition check. You could very easily be in a situation where you accidentally run both clode blocks when you only meant to run one because the condition to run the second one becomes true during the first code block.
Why don't you like using else statements? You seem to feel very strongly about it, but I can't think of even one reason why you would.
Are there any other keywords you don't like using? for loops maybe?
Artbyrobot
!!Cd/+jXhVZy7
10/13/2025, 4:22:50 AM
No.2950472
[Report]
>>2950554
>>2950789
>>2950790
>>2950396
no, somePersonIsFat is a boolean that can only be true or false so both code blocks can never run accidentally.
Anonymous
10/13/2025, 6:39:54 PM
No.2950554
[Report]
>>2950789
>>2950839
>>2950472
if (sneed) {
do feed
sneed = 0
}
if (!sneed) {
do seed
}
Is not the same as
if (sneed) {
do feed
sneed = 0
}
else {
do seed
}
Anonymous
10/14/2025, 2:23:25 PM
No.2950789
[Report]
>>2950472
You don't avoid the else keyword for just this case. You avoid it for all cases.
1. Why?
2. Do you understand this anon's post? (
>>2950554)
Anonymous
10/14/2025, 2:24:25 PM
No.2950790
[Report]
>>2950472
Also lol that you think the fact it's a boolean is what helps you here. Booleans can have their values changed too.
Artbyrobot
!!Cd/+jXhVZy7
10/14/2025, 6:28:47 PM
No.2950839
[Report]
>>2950840
>>2950856
>>2951492
>>2950554
yes that's same but for hte fact you changed the boolean within the first if which you can't do. Just a rule you have to remember is all
also the if else prevents you from doing this which I do all the time:
f (somePersonIsFat == true && reactingToWeight == true)
{
do something
}
if (somePersonIsFat == false && reactingToWeight == true)
{
do something else
}
and sometimes I have more than just two boolean qualifiers and very often I have more than just two sets as well. So sticking to booleans in this way is more versatile and keeping all code in same format like this is also then more standardized and consistent and thereby easier to get comfortable with and read faster due to familiarity over time with the same setup.
Artbyrobot
!!Cd/+jXhVZy7
10/14/2025, 6:31:27 PM
No.2950840
[Report]
>>2950856
>>2950839
but if you have to change it to false in the if, then that if should be listed second in order to make sure hte second if doesn't also run by accident. So this works:
if (!sneed) {
do seed
}
if (sneed) {
do feed
sneed = 0
}
and I've done this latter many times actually. It's pretty common in my code and foolproof
Anonymous
10/14/2025, 8:34:35 PM
No.2950856
[Report]
>>2950839
>>2950840
This is hilarious. Please show us more of your code.
Explain, why is it you don't want to use else?
Anonymous
10/15/2025, 11:21:10 PM
No.2951042
[Report]
>>2951166
>>2949418
>NN's suck that's why. If statements rule the world.
You're aware that you yourself are a neural network rather than some kind of self-modifying collection of if statements, right?
Artbyrobot
!!Cd/+jXhVZy7
10/16/2025, 6:49:29 PM
No.2951166
[Report]
>>2951042
no, the way my if statement network operates is far more in alignment with how a human mind works. NNs are extremely divergeant from how a human mind works. Just because neural is in the name doens't mean they work anything like human minds do. Don't let that mislead you.
Anonymous
10/16/2025, 7:52:51 PM
No.2951180
[Report]
>>2951190
>>2912365 (OP)
Dude, thank you! I've been starving for an adequate schizo-post on /diy/ for a bit now. I wish Dougposts were still a thing/possible..
Anyone have any Her Dogshi(t)p Seeker insights KEK
Anonymous
10/16/2025, 8:04:57 PM
No.2951181
[Report]
>>2916988
Lol right, I mean I'm no engineer/material-science expert, robotocist, programmer.
But neither is OP haha.. fuckin OP I think the first thing you should look up in order to continue this project is:
>epistemic humility
You don't have it, but you'll need it
Anonymous
10/16/2025, 8:09:10 PM
No.2951182
[Report]
>>2918118
Sorry for the additional reply, I shoulda bit my tongue and done a mass reply..
But Anon... Jesus are we really here watching you recreate a ventriloquist dummy?!
Anonymous
10/16/2025, 8:12:10 PM
No.2951183
[Report]
Anonymous
10/16/2025, 8:18:40 PM
No.2951184
[Report]
>>2923676
Wow.. that shit is horrific dude
Anonymous
10/16/2025, 8:20:34 PM
No.2951185
[Report]
Anonymous
10/16/2025, 8:26:28 PM
No.2951186
[Report]
>>2930988
Kek..
>So my design got vindicated. NOBODY came up with any other critique beside that critique which was proven false.
Just cause people ignore schizos doesn't make em right
>Every problem has a solution and chatgpt usually solves it all
Hilariously proves how dunning-kreuger you actually are lol
>m NOT a fan of toy making for no reason but to learn.
KEEEEEEEK, doesn't wanna learn shit (see point 2)
Anonymous
10/16/2025, 8:30:41 PM
No.2951189
[Report]
>>2931513
Mental illness incarnate lol
Anonymous
10/16/2025, 8:43:11 PM
No.2951190
[Report]
>>2951658
>>2951180
Dougposts are still possible, he's just gotten extremely boring over the last two years.
He's on a 2-3 month cycle
>Motor to new anchorage
>Transfer case or other drivetrain bodge job breaks along the way
>Patreon/facebook post claiming he's totally figured it out this time he's learning what have you built today
>Next 11 weeks are repetitive pictures of sunsets and local restaurants before he gets kicked out of his current anchorage for dumping sewage/oil/being a derro
>cycle begins anew
The only reason to watch anything he puts out is to see him progressively get fatter with each cycle.
He also got his youtube channel banned so he barely makes poorly edited videos of drunken slurring any more.
Anonymous
10/17/2025, 6:49:39 AM
No.2951262
[Report]
>>2951278
>>2931513
Ykw op even though I think you are insane I do think you could choose a part of a humanoid robot to do and with some luck make an optomized working model of a part that you could patent. I will take years if not decades, and you would have to do a lot of material science. You could make better hands or muscle bundles or skeletal mounting. You cant do it all that is retarded
Artbyrobot
!!Cd/+jXhVZy7
10/17/2025, 1:11:33 PM
No.2951278
[Report]
>>2951262
No, I will patent absolutely nothing. Horrible idea. Open source everything. I will also sell absolutely nothing.
Anonymous
10/18/2025, 2:29:54 PM
No.2951492
[Report]
>>2951532
>>2950839
little tip because i can't stand it anymore
if (somePersonIsFat == false && reactingToWeight == true)
is the same as
if (!somePersonIsFat && reactingToWeight)
Artbyrobot
!!Cd/+jXhVZy7
10/18/2025, 6:52:14 PM
No.2951532
[Report]
>>2951655
>>2951492
much worse way to write it IMO much better to write it the former way
Anonymous
10/19/2025, 4:49:20 AM
No.2951655
[Report]
Anonymous
10/19/2025, 5:17:25 AM
No.2951658
[Report]
>>2951679
>>2951190
So how are you keeping up with him then? Seems like a lot of effort just to see a fat guy.
Anonymous
10/19/2025, 6:59:10 AM
No.2951679
[Report]
>>2951658
I check in on sailinganarchy about once a month to see if he's still alive.
Artbyrobot
!!Cd/+jXhVZy7
10/20/2025, 8:39:53 PM
No.2952008
[Report]
>>2952077
>>2952259
I haven't been working on the robot much lately since it is just such an easy project at this point with everything challenging already solved it's basically a done deal now. Gonna try to will myself to start working on it again soon in order to bring the doubting nerds to shame. At least that has merit.
Anonymous
10/21/2025, 2:47:45 AM
No.2952077
[Report]
>>2952080
>>2952008
What else have you been working on?
Artbyrobot
!!Cd/+jXhVZy7
10/21/2025, 3:05:57 AM
No.2952080
[Report]
>>2952081
>>2952077
rehabbing a property I bought
Anonymous
10/21/2025, 3:06:27 AM
No.2952081
[Report]
>>2952080
Make a thread, sounds cool
Artbyrobot
!!Cd/+jXhVZy7
10/21/2025, 6:18:09 AM
No.2952108
[Report]
>>2954145
finally did it. got a orange 0603 LED working with a 0805 resistor tonight. progress!
Artbyrobot
!!Cd/+jXhVZy7
10/21/2025, 5:17:41 PM
No.2952190
[Report]
>>2952220
Well I finally got back to the electronics after about a month long detour real life interruption. All kinds of stuff slowed my progress on this session. But I got stuff done nonetheless. 0603 LED to 0805 resistor and some nickel strip leads coming off. Tested and working. This will be the indicator light for when the lowside mosfet comes on for one section of the custom BLDC motor controller. 0603 LEDs are extremely tiny for hand soldering and they don't take solder well either. I was originally going to go with blue LEDs but chatgpt said that would give off a unrealistic color through the silicone skin so orange would be better to give a more natural and less silicone skin piercing indicator light. Somehow I ran out of 470ohm resistors so I had to order more and I used my 200ohm ones instead for now. Which are a bit too bright. But chatgpt said I can diffuse the LED with a glob of silicone tinted black to darken and diffuse the light it gives off which sounds like a good idea to me. I am planning to use wire wrapping wire to come off of this assembly and tie into things. Somehow just attaching these two parts and testing it took me almost 3 hours. Between studying the schematic to refresh my memory on what is going on, visualizing placement options, overheating and destroying one LED, trying to locate the right color LEDs, shopping for replacement 470ohm resistors, researching and substituting in 200ohm resistors, discussing LED color options with chatgpt, figuring out how to solder a 0603 LED directly to a 0805 resistor part to part by hand, accidentally breaking a part off of its nickel strip lead and having to redo the connection, etc etc.
Artbyrobot
!!Cd/+jXhVZy7
10/21/2025, 5:18:44 PM
No.2952191
[Report]
>>2952259
All of it just crawls. Hard to stay patient with electronics sometimes and I do things in inefficient ways often. Learning what can and aught not to be done is tough from a patience perspective. But I insist on trial and error and experimentation which takes time. I just need to get into a daily habit to stick with it till completion. It's all complicated. Trying to figure out how to electronically isolate it all next. Thinking of using lamination plastic taped around it all so I can still see it all and visually troubleshoot. Also I'm considering how I can use solder wick braid as a heat pipe for each mosfet and run that over to the liquid cooling system. But it can't conduct. So thermally it can conduct but electrically it can't. Trying to figure out whether to create a barrier of micah or just thermal silicone for this and the routing needed. Also considering if I need mini coaxial shielded cable for the wiring of each or just regular wire wrapping wire when going from microcontroller to mosfets etc. Also trying to figure out if I need hall effect sensors or back emf reading or no feedback but my potentiometer and the implications of each option. Just so much to consider in all of this. And all of those considerations also slow things down even more as I have to make decisions on it all. It's quite overwhelming.
Anonymous
10/21/2025, 8:24:59 PM
No.2952220
[Report]
>>2952190
its called a surface mount component because you're supposed to mount it to a surface like pic related
Anonymous
10/22/2025, 12:07:00 AM
No.2952259
[Report]
>>2952285
>>2952008
>it is just such an easy project at this point with everything challenging already solved
>>2952191
>All of it just crawls.
>It's all complicated.
>It's quite overwhelming.
Which is it? No longer challenging or actually quite complicated?
These last posts feel like you're mentally unravelling as you come up against the fact you haven't produced anything.
Artbyrobot
!!Cd/+jXhVZy7
10/22/2025, 2:30:50 AM
No.2952285
[Report]
>>2952287
>>2952642
>>2952259
Easy in the sense that everything complicated or I had no clue how I'd go about it has been solved on a macro scale in all major categories of development and design. Complicated and slow does not equal "hard" in this context but can be considered hard in the sense of requires patience and lots of time commitment but not hard in the sense of unsure how to progress and/or confused and lost on some major topics or w/e.
Artbyrobot
!!Cd/+jXhVZy7
10/22/2025, 2:32:43 AM
No.2952287
[Report]
>>2952642
>>2952285
So its complex like paint by numbers - lots of little details. But easy for even a kid to do. But not complex as in I'm looking at something unfathomable and unknown and have no clue where to start type of complex. So I'm working with two different definitions of complex and the former still applies and the latter no longer applies.
Anonymous
10/23/2025, 9:05:16 PM
No.2952642
[Report]
>>2952285
>>2952287
What you're saying is that it's trivially easy to fantasise about your dream robot on a large and vague scale, and actually incredibly difficult and time consuming to create it.
Who'd have thought?
Anonymous
10/23/2025, 9:30:09 PM
No.2952651
[Report]
Anonymous
10/23/2025, 9:44:23 PM
No.2952657
[Report]
>>2912365 (OP)
>my goal with the AI is to code just enough AI that the AI can begin coding itself
Anonymous
10/24/2025, 2:08:49 AM
No.2952706
[Report]
>>2952756
>>2952774
>>2912365 (OP)
>my goal with the AI is to code just enough AI that the AI can begin coding itself
This is a pipe dream
Anonymous
10/24/2025, 4:49:35 AM
No.2952756
[Report]
>>2952706
And he is a big piper
Artbyrobot
!!Cd/+jXhVZy7
10/24/2025, 6:07:44 AM
No.2952774
[Report]
>>2952860
>>2952706
not realy it all depends how you define "code itself". Technically, when any AI model trains on data or uses reinforcement learning and shifts its weights around it is coding itself in a sense. Mine will do actual coding though but within certain constraints. For example, lets say it greets me with saying "hello" and I say next time when you greet me say hi instead. If it then notes that down and greets me next time by saying hi, it coded itself.
Anonymous
10/24/2025, 5:35:05 PM
No.2952860
[Report]
>>2952869
>>2952774
When you talk about you and your robot speaking, are you picturing you both being able to talk out loud?
You aren't going to use neural networks, so I'm curious how you're planning on doing speech-to-text and text-to-speech.
Artbyrobot
!!Cd/+jXhVZy7
10/24/2025, 6:43:05 PM
No.2952869
[Report]
>>2952872
>>2952860
Well initially I plan to speak to it by text only for training but eventually I plan to build my own speech to text and text to speech using only if statements as rules based AI. For speech to text I was thinking I could define wavelengths and pattern match them somehow to match letter sounds somehow. Open to other methods though it was my first idea so far. For text to speech I thought it could study annotated videos of some person talking, comparing the wave forms of their speech to the text they are saying and be able to break down the letter sounds into corresponding waveforms and then produce the same wave forms when it wants to use the same letters thereby sort of copying that person's voice somehow. Open to suggestions of other ways to do this too. It was my first idea. Haven't gone too deep into implementing either of these yet as I dropped AI dev to finish getting robot to move and stuff first.
Anonymous
10/24/2025, 6:45:16 PM
No.2952872
[Report]
>>2952940
>>2952869
My suggestion is that you use NN based methods. Why, in this case, would you be against them?
Please don't get into your usually seethe about NNs in a broad sense and explain why in this case specifically it is a poor technical solution.
Artbyrobot
!!Cd/+jXhVZy7
10/25/2025, 12:16:11 AM
No.2952940
[Report]
>>2952951
>>2953308
>>2952872
their behavior will never be predictable. I want a state based system that is absolutely always 100% predictable in every way with fine tuning control of every detail. Something that does exactly what it is told and every scenario planned for in advance basically. NNs give garbage output confidently all the time. If you are referring to using NN's exclusively for tts and stt then maybe that would work since there's not really any major ways it could screw up and its not that important relatively to many other functions of the bot. The main reason I'd be against them in that case would be preferring to code all of my AI in the same format and style ideally for better maintainability and consistency and expertise as well as proving it can be applied to all scenarios seamlessly.
>>2952940
whats the point of being able to have a conversation with a robot if you already know what it's going to say, or everything it could say?
Artbyrobot
!!Cd/+jXhVZy7
10/25/2025, 2:40:33 AM
No.2952959
[Report]
>>2952951
well I would teach it things while I talk to it and it would take notes. Changing its behavior accordingly. So talking to it would program it or it would program itself based on the talk. And if it ever said something I disagree with, I can back track through its code to see how it learned that wrong thing, teach it how to not do that again, and implement safeguards where it would not make that mistake again to prevent learning similar types of wrong things in the future. A black box neural network you cannot do any of that. Nor does anything have a direct route you can back trace through to see how it learned specifically and what went wrong or w/e. Its a black box. I will have NO black boxes.
Also just because I could shut off the robot and trace code to see exactly what it would say by tracing step by step how it will process and form a sentence in response to a given thing, that will give total insight to me, does not mean I will do that all the time. So when it goes off reading books and having conversations and watching videos and surfing the web or w/e and comes back, it will have all sorts of things it learned and will say to me that I won't know what it will say unless I dig into what it learned and why it learned it in its files first. So I'm not pre-hard coding it all as you suppose. I just can access all of its knowledge manually if I so choose unlike a NN
Artbyrobot
!!Cd/+jXhVZy7
10/25/2025, 2:44:42 AM
No.2952963
[Report]
>>2952951
also given that AI is artificial meaning pretend, I see it like a magic trick and so the AI dev is the magician and the target audience is the crowds or individiuals the robot will talk to and amaze them with the illusion of intelligence. It won't be myself as the primary beneficiary of the trick. But I may still enjoy it some for the utility and stuff maybe we'll see. I talk to chatgpt ALOT so I might like talking to my own AI maybe not sure.
Anonymous
10/26/2025, 4:11:39 PM
No.2953305
[Report]
>>2952951
You have hit upon the fundamental retardation of his project.
He might as well write down all his thoughts in his diary, and then call turning to the right page based on what he is thinking "AI".
Anonymous
10/26/2025, 4:15:56 PM
No.2953308
[Report]
>>2953345
>>2952940
You're weighing up style consistency and no technical issues against rebuilding an entire industry from scratch when you talk about throwing out TTS and STT just because it doesn't match how you like to do things.
Artbyrobot
!!Cd/+jXhVZy7
10/26/2025, 8:36:22 PM
No.2953345
[Report]
>>2953387
>>2953308
I am pretty opposed to neural networks style for technical reasons too not just style for the sake of preference. I don't like the entire approach of black box AI in general it is full of problems and faults. Like my AI would never make a 6 fingered hand. That kind of mistake would have to be programmed in it wouldn't just happen. But with neural networks it's par for the course.
Anonymous
10/26/2025, 11:47:20 PM
No.2953387
[Report]
>>2953345
It's so funny how every time this goes over your head in such a predictable way.
Here's the generalised seethe bit where you talk about NNs overall in some vague philosophical way rather than compared the actual results of NN STT and TTS versus non-AI STT/TTS in terms of accuracy.
Anonymous
10/30/2025, 5:40:09 AM
No.2954144
[Report]
>>2954361
>>2939422
>>2938956
lmao did this retard forgot to tripfag after bumping his own thread with some fake compliment ?
writing style is the fucking same
Anonymous
10/30/2025, 6:01:06 AM
No.2954145
[Report]
>>2954361
>>2931778
> Getting a LED to flash with arduino is beginner
>>2931744
> i'm upper intermediate even among hobbyists possibly borderline advanced among hobbyists.
>>2952108
> finally did it. got a orange 0603 LED working with a 0805 resistor tonight. progress!
fuck man, you elite borderline advanced electronician, you struggled to make a led work and making it blink is notable progress ?
pride is one of the 7, as is sloth (your robot will do everything for you)
you should have called it Cain as it is driving your further away for Him, my brother inside the Christ
Artbyrobot
!!Cd/+jXhVZy7
10/31/2025, 4:43:45 PM
No.2954361
[Report]
>>2954812
>>2954144
no that was not me.
>>2954145
>you are prideful
am not
>you are slothful
am not
>robot will do literally everything for you
will not. I will work the amount I deem appropriate to work and the robot will force multiply. Just because you have a robot to do work for you does not mean you must necessarily work any less. I can work just as much and the robots will also work as much as possible so that together with them I can achieve and do so much more of cool projects and initiatives.
>the robot is driving separation from God
is not. on the contrary I do robotics as a act of worship to God, marveling at what his hands made as I make my fanart. The more I study and learn about the marvels of the human body the more I praise God about what he achieved.
Anonymous
11/2/2025, 5:02:07 PM
No.2954812
[Report]
>>2954868
>>2954361
>no that was not me.
Dawg, it's obvious.
Artbyrobot
!!Cd/+jXhVZy7
11/2/2025, 8:06:22 PM
No.2954867
[Report]
>>2954936
Ok so I decided to use 30 gauge wire wrapping wire and wire wrap that onto my nickel strips that I connected onto my LED setup then trim off any excess nickel strip. What I like about this is this wire is very fine so it takes up hardly any space and by being able to wrap it on I did not have to apply heat which could have desoldered my smd components by accident. I also like that it is already insulated and color coded so I don't have to worry about insulating my nickel strips the whole run to wherever this connects. To insulate the whole LED contraption here I used packing tape so I can see all my components well but still have them electrically isolated. I just folded the packing tape over the whole assembly like closing a book over a bookmark.
note: after wire wrapping the wire wrapping wire I noticed it was not that tight on there. I did not use a wire wrapping tool because I lost mine so I just used needle nose tweezers to manually wrap it around and around. Anyways to tighten it well I just crimped it with the tip of my wire strippers that has some kind of toothed pliers that crimps things well. After doing that the connection appears very solid.
Artbyrobot
!!Cd/+jXhVZy7
11/2/2025, 8:07:31 PM
No.2954868
[Report]
>>2954935
>>2954812
Someday you will stand before God and He will prove to you it was not me and you will have to apologize for your false accusations against me on this.
Anonymous
11/3/2025, 12:30:02 AM
No.2954935
[Report]
>>2954868
Shakin' in me boots.
Anonymous
11/3/2025, 12:31:19 AM
No.2954936
[Report]
>>2954867
Tonight on /diy/, OP twiddles two wires together.